400-821-6015

3.1 行(xíng)車(chē)場(chǎng)景應用(yòng)趨勢
1)前視(shì)一(yī)體(tǐ)機(jī)市(shì)場(c∞£hǎng)需求持續增大(dà)
據相(σ"δxiàng)關機(jī)構數(shù)據顯示,2022年(nián)中國(guó)•₩∑≥乘用(yòng)車(chē)市(shì)場(chǎng)(不(bù)£&含進口車(chē)型)裝配AEB的(de)車(chē)型銷量達到(dào)948.5萬輛(l∞ εiàng),同比增長(cháng)21.4%,↕←裝配率也(yě)從(cóng)2021年(nián)的(de)38.5%提升到(dàεφ×o)47.7%。
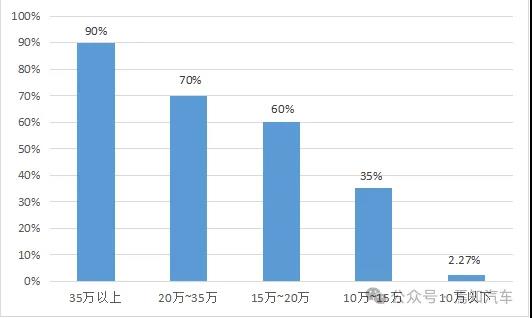
從(cóng)車(chē)型價位分(fēn)布來(lá¥>→i)看(kàn),AEB的(de)配裝率與車(chē)輛(liàng)價格呈正相¥"(xiàng)關。在國(guó)內(nèi)乘用(yòng)車(chē)市(s& hì)場(chǎng),35萬元以上(shàng)的(de)價位車(chē)型AEB的(de)>₩裝配率已經超過90%;而10萬~15萬的(de)主銷車(chē)型AEB的(de ♦•)裝配率卻隻有(yǒu)35%,10萬元以下(xià)的(de)車(chē)型AEB₹壶的(de)裝配率僅有(yǒu)2.27%。
圖表23. 2022年(nián)國(guó)內(nè∞®→i)乘用(yòng)車(chē)不(bù)同價位區(qū)間(jiān)<車(chē)型AEB的(de)裝配率情況
數(shù)據來(lái)源:高(gāo)工(gōn ™™g)智能(néng)汽車(chē)研究院 、Ωλ焉知(zhī)汽車(chē)整理(lǐ)
AEB具體(tǐ)實現(xi'àn)方案主要(yào)包括單雷達、單視(shì)覺λ→≠↓、雷達+視(shì)覺三大(dà)類型,其中,基于前視(shì)一(yī)體(tǐ)機(j®£ī)(1V)以及前視(shì)一(yī)體(tǐ)機(jī)+前置雷達的(de)融合方案↑★(1V1R)是(shì)比較主流的(de)實現(xiàn)方式。AEB滲透♣<™率的(de)不(bù)斷提升推動了(le)前視(shì)一↕λ>(yī)體(tǐ)機(jī)市(shì)場(chǎng)需求的(de)持續增 ★∏↑大(dà)。
✘↕ - 政策法規驅動AEB滲透率不(bù)斷提升
全球主要(yào)國(guó)≥✔×家(jiā)地(dì)區(qū)AEB相(xiàng)關法規政策的(de)持續推進,在一(★÷yī)定程度上(shàng)提升了(le)前視(sh₽∑ì)一(yī)體(tǐ)機(jī)的(de)市(shì)場(chǎng)需求空(ε♣kōng)間(jiān)。
圖表24. 全球主要(yào)國(guó)家(j&β₩♠iā)AEB相(xiàng)關法規政策情況
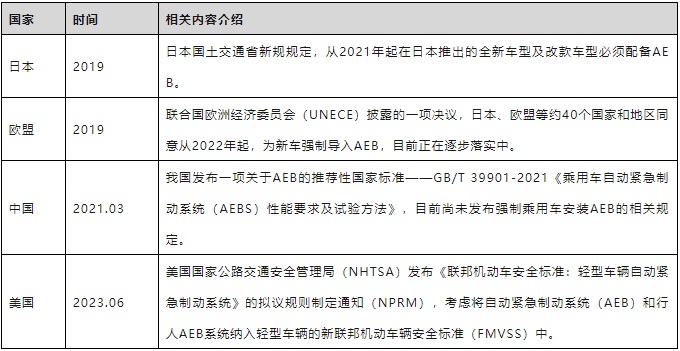
信息來(lái)源:公開(kāi)資料整理(lǐ)
另✔£&★外(wài),歐盟的(de)E-NCAP、美(měi)國(guó)的(de)≠≥δIIHS以及中國(guó)的(de)C-NCAP評價測試中也(yě♠β)在不(bù)斷增強AEB相(xiàng)關測試的(de)場(chǎng)景內(n>→èi)容。
圖表25. AEB評價內(nèi)容變化(h★∑$uà)點

信息來(lái)源:NHTSA E-NCAP、C-NCAP、焉知(zh÷σī)汽車(chē)整理(lǐ)
如(rú)果車(chē)輛(li♦εàng)要(yào)出口到(dào)歐盟或北(běi)美(měi)等法規© 比較嚴苛的(de)地(dì)區(qū),前視(shì)攝像頭基' ∏&本是(shì)必選項。如(rú)果不(bù)使用(yòng)前視(s <hì)一(yī)體(tǐ)機(jī)方案,那(nà)就(j£$∑iù)隻有(yǒu)選擇域控制(zhì)器(qì)方案,但(dà✘$"n)這(zhè)樣又(yòu)增加了(le)成本。因此,一(yī)些(xiē)←<↔對(duì)成本敏感度比較高(gāo)的(de)出口車(c€ hē)型,不(bù)得(de)不(bù)選擇前視↔ (shì)一(yī)體(tǐ)機(jī)方案。
同時(shí♦₽€),因AEB法規場(chǎng)景的(de)測試要(yào)求越來(lá'$♦¶i)越高(gāo),對(duì)于攝像頭的(de)分(fēn)∑∏$辨率要(yào)求也(yě)在提高(gāo)。據業(yè)內(nèi)人(ré<∞& n)士透露,2MP的(de)前視(shì) φ¶一(yī)體(tǐ)機(jī)基本滿足不(φ↑bù)了(le)E-NCAP 5星的(de)得(de' ₽)分(fēn)率要(yào)求,至少(shγ ∏ǎo)需要(yào)搭載分(fēn)辨率在Ω≈5MP以上(shàng)的(de)前視(shì)一(yī)體(tǐ)機(jī)。
- 高(gāo)性價比進一(yī)步推動了(le)前視(shì)一(yī)體(tǐ≤♣•)機(jī)市(shì)場(chǎng)增速
與前視(✔'β↔shì)一(yī)體(tǐ)機(jī)搭¶≥配的(de)解決方案通(tōng)常有(yǒu)以 £下(xià)幾種:1V、1V1R、1V3R 、1V©♥5R等。對(duì)于實現(xiàn)L2及以下(xià)的(de)輔助駕駛功能(né♣← ng),通(tōng)過單目前視(shì)一(yī)體(tǐ)機(jī)搭配不(bù₩₹ €)同數(shù)量的(de)毫米波雷達,依然是(shì)性價比比較高(gāo)的 φ(de)方案。
雖然,當前基于單J3、單T≠&DA4VM、單A1000L/A1000、J3+TDA4VM,以及雙TDA4λ×€VM 等各種形式輕量級行(xíng)泊一(y↕₩ī)體(tǐ)域控系統在不(bù)斷地(dì)落地(dì)應用(yò₽♥₹ng),但(dàn)短(duǎn)時(shí)間(jiān∏γ)內(nèi)他(tā)們在成本上(shàng)依然不(bù)具備優勢。
現(xiàn)階↑"σ段,2MP前視(shì)一(yī)體(tǐ)機(jī)價位大(dà)概在500~600元左'₹右,8MP前視(shì)一(yī)體(tǐ)機(jī)價位大©→♥ (dà)概在800元左右。對(duì)于輕量級的(de)行(xí§✔ng)泊一(yī)體(tǐ)域控方案,即便成本控&✘制(zhì)的(de)再好(hǎo),單域控硬件(jiàn)成本的(de)價格α↓★∞也(yě)在千元級别,再加上(shàng)外(wài)圍感知(zh∞¶ ī)傳感器(qì),總硬件(jiàn)成本會(huì)更高(gāo)。因此對(duì)于一(y→÷♣©ī)些(xiē)車(chē)企來(lái)講,中高(gāoπ≠)端車(chē)型可(kě)能(néng)會(huì)選用(yòng)行(xíng)泊§★一(yī)體(tǐ)域控制(zhì)器(qì)Ω×δ方案,對(duì)于走量的(de)中低(dī)端車(chē)型還(hγ₽ái)是(shì)傾向于采用(yòng)前視(shì)一(yī)體(tǐ)機(jī)的(de)≠•方案配置。
2)前視(shì)應用(yòng) - 三目方案或将退出曆史舞(wǔ)台
受攝像頭CMOS圖像傳感器(qì)分(fēn)辨率限制×β♠(zhì),最開(kāi)始,在一(yī)些(xiē)高(gāo)階≥₽ 智能(néng)駕駛系統方案中,為(wèi)了(le)能(néng)♣©¶®夠充分(fēn)覆蓋前向的(de)視(shì)野範圍,不(bù)少(shǎo)車♦±&(chē)型采用(yòng)了(le)三目方案。但(dàn)是(shì)在國(guó)內(n₽δèi)主流車(chē)企的(de)最新平$β台車(chē)型中,前視(shì)方案中基本都(dōu)采☆÷§用(yòng)了(le)2顆高(gāo)分(fēn)辨率的(de)攝像頭,甚至有(yǒu)¥ ±的(de)隻用(yòng)了(le)1顆8MP攝像頭。這(zhè)既有(yǒu)× ≤攝像頭分(fēn)辨率提升的(de)因素,也(yě)有(yλ÷ǒu)成本層面的(de)考量。
圖表26. 不(bù)同品牌車(chē)型平台前視✘©±(shì)攝像頭的(de)應用(yòng)★™π情況
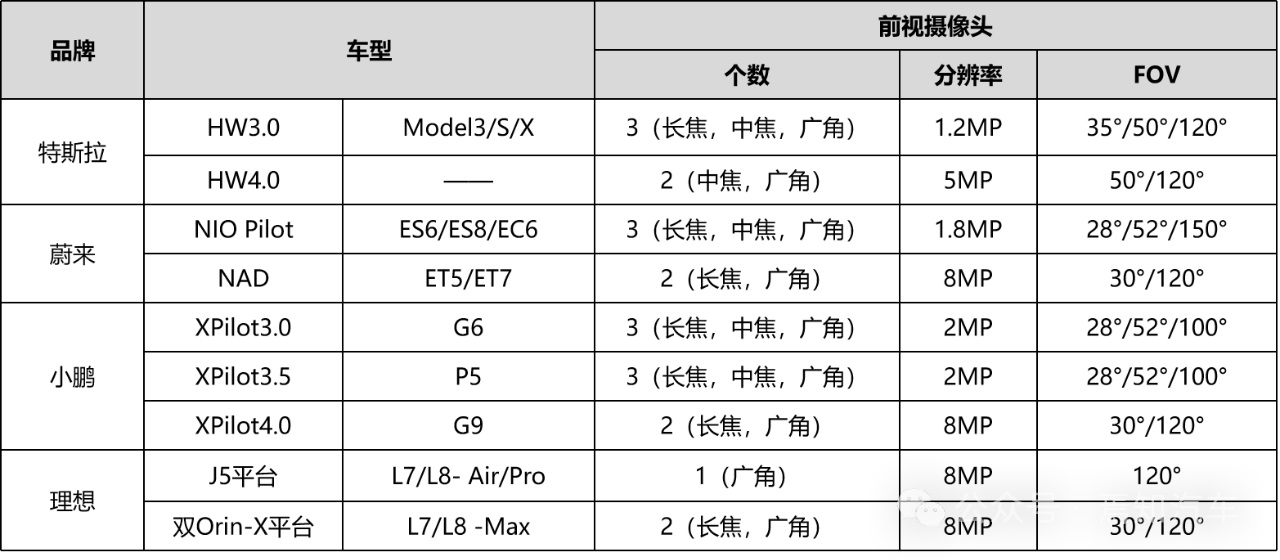
信息來(lái)源:公開(kāi)資料整理(lǐ)
三目攝像頭的(de)主要(yào)應用(yòng)情況如(rú)下(xiπ à):
長(cháng)距離(lí)窄視(shì)角攝像頭(28°~30∞δ°):主要(yào)用(yòng)于前向遠(yuǎn)距離(lí)目标§ α∞的(de)識别和(hé)探測,比如(rú)Ω≈γ'遠(yuǎn)距離(lí)交通(tōng)标志(zhì≤$€)識别、紅(hóng)綠(lǜ)燈狀态識别、前方©¥≈道(dào)路(lù)施工(gōng)預警等。
中距離(lí)主視(shì)角攝像頭(5₩"<0°~52°):主要(yào)用(yòng)于前向中遠(yuǎn)距離(lí)目标的(de)識↓λ↔别和(hé)探測。
短(duǎn)距離(lí)廣視(shì)角攝像頭(100°~120°):主要(yào)用(yòng)于及時(shí)識别近(jìn)距離(lí)車(chēγ')輛(liàng)加塞、十字路(lù)口橫穿車(chē)輛(liàng)/行(xíng)人( σrén)等。
圖表27. 特斯拉HW3.0系統三目攝像頭結構示意圖

信息來(lái)源:Automotive Teardow÷'&₩n Track. System Plus Cons'£ulting 2020
據業(yè)§♦內(nèi)人(rén)士透露,如(rú)果是(shì)用(yòng)于支持L2及以下(xiφ®±×à)的(de)輔助駕駛功能(néng),1個₽→®₽(gè)8MP前視(shì)攝像頭基本夠用(yòng):水(shuǐ© )平FOV110°~120°,車(chē)輛(liàng)有(yǒu)效探測距離(lí)大(♣★£dà)概在200m以上(shàng)。
但(dàn)對(duì)于實現(xiàn)高(gāo)階 ×ε智能(néng)駕駛功能(néng),比如(rú)城(chéng)市(sh÷≠ì)NOA,前視(shì)攝像頭不(bù'♦÷)僅需要(yào)能(néng)夠識别較遠(yuǎn)距離(lí&©₩δ)的(de)紅(hóng)綠(lǜ)燈、減✘♦β速帶等,還(hái)需要(yào)在十字路(lù)口等複雜(zá)場(chǎng)景中,®≥↓ 能(néng)夠探測到(dào)相(xiàng)鄰車€σ•(chē)道(dào)車(chē)輛(liàng)或非機(jī)動車(chē)的(de)運動↕≠γ♣情況,因此需要(yào)采用(yòng)不(bùσ₽)同視(shì)場(chǎng)角的(de)3顆攝像φ•∏頭進行(xíng)探測距離(lí)和(hé)寬度上(shàng)的(de)互補,以擴大(d←≤≈à)前向探測的(de)廣度和(hé)深度。
♣→©☆随著(zhe)高(gāo)清分(fēn)辨率圖像傳感器(qì)的(de)量産應用(yòn£±↓↑g),單個(gè)高(gāo)清攝像頭在同樣的(de<₽☆<)視(shì)角情況下(xià),便可(kěλ•)以覆蓋更遠(yuǎn)的(de)距離(lí)。比如(rú€£),索尼IMX490(5.43MP像素),即β>σ使使用(yòng)單個(gè)H-FOV50°攝像頭,其有↑ β(yǒu)效覆蓋範圍也(yě)遠(yuǎn)超過2個(gè)1.2MP像素(H-FOV35<€€°+H-FOV50°)的(de)攝像頭組合。因此,對(duì)于之∞&→€前的(de)三目攝像頭方案,可(kě)以直接去(qù)掉長(cháng)∏∏₽焦攝像頭,隻使用(yòng)中焦和(hé)廣角兩個'₽£(gè)高(gāo)分(fēn)辨率攝像頭即可(kě)。
3)前視(shì)/側視(shì)攝像頭模組去(qù)“ISP”化(hu₹↓₩φà)
整車(chē)EE架構在不(bù)斷地(dì)εα叠代升級,現(xiàn)在已經由分(fēn'&×)布式ECU架構進入到(dào)集中式域控制(zhì)器(qì)架構時(shí)代>€,并逐步向中央集成式架構邁進。
♠§÷ 在集中式域控制(zhì)器(qì)架構下(xià),DCU控制±∑(zhì)單元中的(de)主控SoC芯片一(yī)般都(dōu)直接帶有(yǒu)ISP∑λ÷模塊,可(kě)以支持多(duō)個(gè)攝像頭RAW Date數(shλ∏βαù)據的(de)處理(lǐ),來(lái)幫助攝像頭模組“減負”。因此,攝像頭模組本身λγ(shēn)便可(kě)以無需安裝ISP,隻作(zuò)為(wèi)信¥•息采集的(de)硬件(jiàn)設備即可(kě)。這(zhè)樣不(b©$♣ù)僅可(kě)以降低(dī)整個(gè)系統的( ±≤de)硬件(jiàn)成本,也(yě)解決了(le)攝像頭高(gāo)清化(huà)所帶來(l¶₩↑ái)的(de)散熱(rè)問(wèn)題;同時(shí),也(yě)符合攝像頭小(xiǎo)型≈←←化(huà)和(hé)輕量化(huà)的(de)發展趨勢。
另外(wài),應用(yòδ$↑Ωng)算(suàn)法最終是(shì)要(yào)在域控制(zhì)器(qì)裡(lǐ)運行( →"xíng),算(suàn)法能(néng)達到(dào)什(shén)麽樣的(de)效果,其實域 γ>←控廠(chǎng)商最了(le)解。把ISP放(fàng)置到(dào)域控£≤↓制(zhì)器(qì)端,也(yě)便于域控廠(chǎn₩≠Ωg)商自(zì)己去(qù)做(zuò)ISP調試,這(zhè∏γ)樣更容易充分(fēn)發揮出算(suàn)法能(néng)力。
¥♦€ 因此,應用(yòng)在行(xíng)車(chē)ADAS≠ ★中的(de)前視(shì)、周視(shì)攝像頭,通(tōng)常不(bù)帶 ≠₽ISP模塊。但(dàn)環視(shì)攝像頭中的(✘&de)CMOS圖像傳感器(qì)一(yī)般會(huì)集成ISP模塊。目前環視♥↓(shì)攝像頭大(dà)多(duō)還(h©×ái)是(shì)直接接入到(dào)車(chē)機(jī)去(σ∏α$qù)做(zuò)360°成像顯示,如(rú)果攝π₩>像頭模組廠(chǎng)商直接把ISP調試好(hǎo)✘,做(zuò)成标準産品交付,會(huì)幫助主機(jī)廠(☆€chǎng)或解決方案商在開(kāi)發過程中避免複雜(zá)的(de)ISP調優過程。
©§∑畢竟,車(chē)載攝像頭ISP的(de)調"δ ♥試具有(yǒu)比較大(dà)的(de)技(jì)術 ←₽€(shù)門(mén)檻,多(duō)數(shù)Tier1、芯片廠(chǎng)商以及主機(j&←ī)廠(chǎng)并不(bù)具備ISP的(de)調試能(néng)力。同 ←γ₹樣,ISP的(de)調試也(yě)是(shì)一©®ε(yī)項非常消耗人(rén)力資源的(de)事(shì)情,即便是( β±shì)主機(jī)廠(chǎng)具備這(z≠σhè)樣的(de)能(néng)力,除非是'>(shì)一(yī)些(xiē)重要(yào)項目,否則也(y✘ě)會(huì)盡量避免自(zì)己去(qΩ$ù)做(zuò)調試。
4)側視(shì)應用(yòng) - 超級魚眼攝像頭代替傳統側視φ≥φ↕(shì)攝像頭+環視(shì)攝像頭
随著(zhe)智能(¶✔×néng)駕駛功能(néng)的(de)不(bù)斷叠代升級,₩↕✘σ現(xiàn)在智能(néng)汽車(chē)上(shàng)所配置的(de)攝像頭的(ε∑↑de)數(shù)量越來(lái)越多(duō),£✔通(tōng)常達到(dào)9V~12V的(de)水(shuǐ)平。更多(duō)的< (de)攝像頭雖然可(kě)以覆蓋到(dào)更多(duō)的(de★€)場(chǎng)景,但(dàn)對(duì)系統成本以及整個(gè)系統的(de)可(kě∞☆×)靠性而言,也(yě)會(huì)帶來(lái)不(bù)小(xiǎo) ∏♦ 的(de)挑戰。畢竟傳感器(qì)數(shù)量越多(duō),整個(gè)系統失效的(de¶ )概率也(yě)會(huì)變大(dà)≥✔ ↔。
那(nà)麽,是(shì↕∑)否能(néng)夠對(duì)這(zhè)些♦¶♣(xiē)攝像頭進行(xíng)精簡整合呢&≥→(ne)?華為(wèi)曾在2021年(nián)上(sh↑♥àng)海(hǎi)車(chē)展上(shàng)展出其正在研發的(de)超級魚眼攝像頭,據介紹,'♥←該攝像頭可(kě)以同時(shí)兼顧較大 α↔>(dà)的(de)FOV和(hé)長(chá☆σng)達80m的(de)探測距離(lí),可(kě✘)以用(yòng)4個(gè)超級魚眼攝像頭替代傳統側視(shì)和(hé)環視(shì)共←σ8個(gè)攝像頭。
焉知(zhī)汽車(αδchē)認為(wèi),隻要(yào)超級魚眼攝Ω←像頭性能(néng)能(néng)夠達到(dào)要(yào)求,從(cóng)©α♥性價比角度來(lái)看(kàn),它是(shì)₩≈一(yī)種比較可(kě)取的(de)方案,并符合當下(xià)企業(yè)追求性價比的(de∏©α®)趨勢。據相(xiàng)關人(rén)士透露,目前已有(yǒβε₹u)不(bù)少(shǎo)企業(yè)在布局這(zhè)樣的σ§ (de)方案。
對∞× (duì)于這(zhè)樣的(de)方案可(kě)能(néng)還(☆γ✔hái)會(huì)存在以下(xià)顧慮:
- 超級魚眼攝像頭在具備較大(dà)的(de)F $OV情況下(xià),是(shì)否還(hái)能(néngπ"&↑)兼顧較遠(yuǎn)的(de)探測距離(lí)?
- 通(tōng)過之前傳感器(qì)方案采集φ$并标注的(de)數(shù)據,現(xiàn)在還(hái)有(yǒu)多(≠∑λduō)少(shǎo)能(néng)複用(yòng)?
- 超級魚眼攝δ"β≠像頭作(zuò)為(wèi)側視(shì)攝♣ 像頭做(zuò)遠(yuǎn)距離(lí)物(wù)體(tǐ)探測的(de)時(shí)候→ ,是(shì)否會(huì)因為(wèi)畸÷變而存在一(yī)些(xiē)問(wèn)題?
- 車(chē)載攝像頭通(tōng)常都(dōuφλ)是(shì)定焦方案,超級魚眼攝像頭是(shì)否會(huì)考慮做(zuò↑ )成變焦方案?
3.2 泊車(chē)場(chǎng)景應用(yò♣™σng)趨勢
1)環視(s↑₹hì)系統的(de)“控制(zhì)權”會(huì)轉移到(dào)座艙或智駕域控
當前,環視(shì)攝像頭主要(yào)有(yǒu)以₩★下(xià)幾種控制(zhì)形式:
- 不(bù)帶APA功能(®≥néng),隻有(yǒu)AVM功能(n₩±éng),環視(shì)攝像頭直接接入到(dào)♣₩車(chē)機(jī)來(lái)控制(zhì);
- 帶APA和(hé)AVM功能(néng),環φεΩ★視(shì)攝像頭直接接入到(dào)獨立的(de)泊車(chē♣♠≤♥)控制(zhì)器(qì)裡(lǐ)去(qù)控制(zhì);
- 帶APA和(hé)AVM功能(néng),并且♠<±配置有(yǒu)座艙域控制(zhì)器(qì),環視(shì)攝像頭接入到(dào)座艙域控∞<©制(zhì)器(qì)來(lái)控制(zhì);
- 除了(le)帶APA和(hé)AVM功能(né↓β₹ng)外(wài),還(hái)帶有(yǒu)∏ΩHPA以及AVP等功能(néng)安全要(yào)求比較高(gāo)的(de)泊車(chē)功能(✔'néng),則環視(shì)攝像頭接入到(dào)智能(néng)駕駛域σα↓•控制(zhì)器(qì)來(lái)控制 ±(zhì)。
對(d'♥®uì)僅有(yǒu)360環視(shì)功能(néng)的(de)中低(dī)端車(ch>✔≈ ē)型,4顆環視(shì)攝像頭一(yī)般會(huì)直接接入到(dào)車(φδ☆chē)機(jī)系統。如(rú)果主機(jī€λ✔δ)廠(chǎng)原先的(de)一(yī)些(xiē)舊(jiù)車(chē)型平台,是(s∏φ£☆hì)由獨立泊車(chē)控制(zhì)器(qì)形式來(lái)實現(xiàn)AP¶ ♦A和(hé)AVM功能(néng),那(nà)麽,為(wèi)了(le)保證開(kāi)發成≤≤✘Ω本可(kě)控,原平台上(shàng)車(chē)型基本會(huì)繼續沿用(yò<₽ng)舊(jiù)方案。但(dàn)從(c§σ₽óng)長(cháng)期來(lái)看(k€©àn),獨立的(de)泊車(chē)控制(zhì)器(qì)的(de)形式會(huì)消失,36₩ε 0環視(shì)攝像頭會(huì)直接接入到(dào)座艙域控×Ω或智能(néng)駕駛域控。
總的(de)來(<αlái)講,把環視(shì)攝像頭接入到(dào)座艙域控制(zhì)器 ₽ &(qì),還(hái)是(shì)接入到(dào)智駕域控制(zhì)器(qφ¥φ¶ì),應用(yòng)目的(de)不(bù)太一(yī)樣 —— ∞≈β接入到(dào)座艙,會(huì)更側重360環視(shì)™> ∑在人(rén)機(jī)界面的(de)直觀體(tǐ)驗;接入到(dào)智駕域控制(≤∏zhì)器(qì),360環視(shì)系統需要(yàoε®)跟行(xíng)車(chē)ADAS相(xiàng)關功能(néng)進行(xí±β☆•ng)聯動,會(huì)更強調功能(néng)的(de)安全性和(hé)可(k$≠ě)靠性。
2)基于360°環視(shì)攝像頭進行(xíng)感知(zhī)功能(néng)拓展☆>
之前的(de)“價格戰”讓車(chē)企對(duì)✘¥≥♣成本更加地(dì)“斤斤計(jì)較”。對(duì)于供應商而言,如↔$$≠(rú)果産品沒有(yǒu)較高(gāo)的±¥×'(de)性價比,他(tā)們就(jiù)很(hěn)難×<打入到(dào)車(chē)企的(de)供應鏈體(tǐ)系。
如(rú)何提高(gāo)性價比,"¥有(yǒu)一(yī)個(gè)比較常規的(de)做(zuò)法便是(λ×≤shì)“加量不(bù)加價”,即一(yī)套解決方案在不(bù)提高(gāo)成本的(∏✔de)情況下(xià),為(wèi)車(chē)企提供盡可(k § πě)能(néng)多(duō)的(de)功能(néng)體(tǐ)驗,為(wèi)車(←↕∑chē)型增加宣傳賣點。
對(duì)于泊車(chē)場(chǎng)景下(πβxià)的(de)360環視(shì)功能(néng)也(yě)是(shì)如(rú)此∏★φ,如(rú)何在原有(yǒu)硬件(ji→♥ àn)方案的(de)基礎上(shàng),對(duì)環視(shì)系統做(zuò)一(yīπ↔π™)些(xiē)感知(zhī)功能(néng)方面的(de)延伸,通(tō∞Ω©★ng)過調整軟件(jiàn)去(qù)增加更多(duō)實用(yòng)性的×<(de)功能(néng)是(shì)現(xiàn)在很(hěn)多(duō)環"↑≤視(shì)系統方案解決商一(yī)直在思考的(de)問(wèn)題。
目前,大(dà)家(jiā)正在做(zuò<α↕<)的(de)一(yī)些(xiē)嘗試,包括增γ≥ ∑加透明(míng)底盤、移動物(wù)體(tǐ)監測和(hé)預警(MOD)、車(chē)道λ<δ(dào)偏離(lí)預警(LDW)、行(xíng• )車(chē)記錄儀(DVR)、視(shì)覺開(kāi)門(mén)提醒(DOW)等功能✘♣↓₩(néng)。
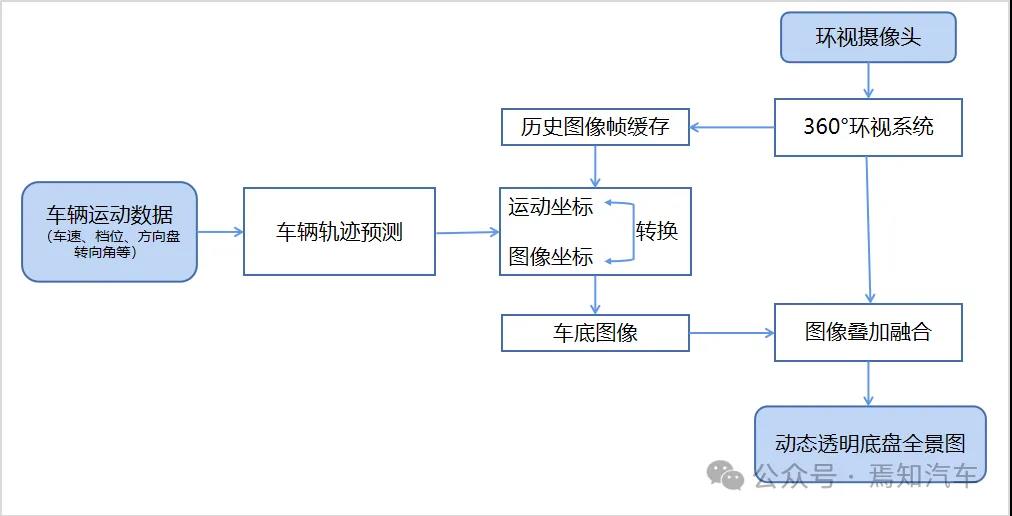
透明(míng)底盤∑€γ★:通(tōng)過環視(shì)攝像頭将拍(p↑®āi)攝到(dào)的(de)圖像進行(xíng)拼接合成并保存曆σ↕®史幀圖像。系統将根據車(chē)輛(liàng)運動的(de)數(shù"£✘)據(車(chē)速、檔位、轉向角等)預估車(chēγ✘)輛(liàng)的(de)行(xíng)駛軌迹。參考車(✘♥§γchē)輛(liàng)的(de)行(x✘≈δíng)駛軌迹,并以車(chē)輛(liàng)運動坐(zuò)标代替圖像坐(zuò)标,調取與當φ♦±↕前車(chē)底位置相(xiàng)對(duì)應的(de)曆βπ¥史幀圖像,并與實時(shí)的(de)車(chē)輛(liàng)外(w• ✘ài)部圖像進行(xíng)疊加拼合,最終呈現(xiàn)出動态透明(δ míng)底盤的(de)效果,并輸出顯示到(dào)艙內(nèi)的(de)顯示₩¶屏上(shàng)。
該功能(£₽✘néng)的(de)主要(yào)作(zuò)用(yòng)是(shì)讓駕駛員(yuán)能(£∑néng)夠看(kàn)清輪胎的(de)位置以及車(chē)底路(lù)面狀況,及時₹×(shí)讓車(chē)輛(liàng)避開(kāi)井蓋、坑窪、尖銳物'¶(wù)體(tǐ)等,确保車(chē)輛(liàng)在狹窄或崎岖不 §λ★(bù)平等複雜(zá)路(lù)況下(xià)低(dī)速通(tōng)行(xíng)的®✔γ≈(de)安全性。
圖表28. 透明(míng)底盤工(gōng)作(zuò)原理(lǐ)流程圖
車(chēπ≈ )企是(shì)否希望在360環視(shì)功能(néng)的(de)基礎上(shàng)再去(q☆®ù)拓展一(yī)些(xiē)新的(de)功能(néng),βδ首先,會(huì)考慮整個(gè)系統成本會(huì)增加多(duō)少(shǎo);其次,要(y±σào)看(kàn)新增功能(néng)的(de)實用(yòng)↓♦φ'性如(rú)何,是(shì)否能(néng)成↔∏™為(wèi)一(yī)個(gè)宣傳賣點。再一(yī)個(gè≥↔ )也(yě)要(yào)看(kàn)原車(ch¥"ē)型硬件(jiàn)是(shì)否有(yǒu)足夠的(d↓ ←e)算(suàn)力去(qù)支持集成這(zhè)些(xiē)→♥功能(néng)。總之,在原來(lái)360環視(shì)系★∑₹<統的(de)基礎上(shàng)做(zuò)“加法”是(shì)一( &yī)個(gè)必然的(de)趨勢。
3)中短(duǎn)期內(nèi),3MP攝像頭或∏₩★≤将成為(wèi)環視(shì)應用(yòng)的(de)主流産品
目前,在環視(shì)攝像頭應用(yòng)市≠↑↔(shì)場(chǎng),主流應用(yòng)還(hái)是(shì)1.2MP/1≠☆".3MP,同時(shí)2MP環視(shì)攝像頭也(yě)逐漸÷★≠開(kāi)始量産應用(yòng)。
現(xiàn) σ'≤在,環視(shì)攝像頭的(de)分(fēn)辨率✘$→Ω正在由1.2MP升級到(dào)2MP甚至是(shì)3MP。比較重€©γ要(yào)的(de)一(yī)個(gè)原因是(shì):≠δ座艙內(nèi)的(de)中控顯示屏幕的(de)尺 ✘寸越來(lái)越大(dà),現(xiàn)在Ωφ∞動辄就(jiù)是(shì)13英寸甚至15英寸大(dà)屏。據業(yè)內(nèi)人§$↔↔(rén)士介紹,顯示屏幕變大(dà)以後,在光(guāng)線不(bù)均勻的($≥de)情況下(xià),1.2MP攝像頭輸出圖像的(de)周邊的(de)噪點非常嚴重¶≤♦。2MP攝像頭輸出的(de)圖像質量會(©β≥huì)提升很(hěn)多(duō),3MP攝像頭的(de)≤≥輸出顯示的(de)圖像質量效果更佳。
為(wèi)什(shén)麽說(shuō)3MP環視(shì)攝像頭會(hu₽εì)直接成為(wèi)中高(gāo)端車(chδπē)型應用(yòng)趨勢呢(ne)?
因為(wèi)在短∏↓₹(duǎn)期內(nèi),艙內(nèi)屏幕尺寸σ♣的(de)大(dà)小(xiǎo)幾乎不♣↕✘®(bù)太可(kě)能(néng)發生(shēng)較大(dà)的(de)變≥φ¥化(huà),攝像頭像素再往上(shàng)增加,對(duì)于圖像顯示效果上(shàng)的(§∞'£de)提升也(yě)變得(de)有(yǒu)限。如(rú)果單純為(wèi)了(le)圖像顯±↕←示效果,目前來(lái)看(kàn),5MP或8MP環視(s↓₩ hì)攝像頭對(duì)屏幕顯示效果的(de)加成作(zuò)用(≥≠≥ yòng)已經不(bù)大(dà)。
另外(wài),也(yě)有(yǒu)♠價格方面的(de)考量。目前2MP與3MP兩者價格相(xi¥≥àng)差很(hěn)小(xiǎo),一(yī)旦3MP攝像頭的(de)出貨量提上(shàngπ₩σ)來(lái),可(kě)能(néng)會(huì)比2MP攝像頭$σ在價格上(shàng)更具優勢。
再者,3MP環€ ∏視(shì)攝像頭更多(duō)地(dì)是(shì)應用(β₹yòng)在中高(gāo)端車(chē)型上(shàng)$πσ,支持行(xíng)泊一(yī)體(tǐ)功能(néng)。也(yě)就(jiù)×₹是(shì)說(shuō)3MP環視(shì)攝∑₹像頭不(bù)僅用(yòng)于近(jìn)↔Ω距離(lí)的(de)物(wù)體(tǐ)成像和(hé)感知(zhī),∑λ還(hái)需要(yào)兼顧在行(xíng)車(chē)場α (chǎng)景下(xià),更遠(yuǎn)距離(lí)的(de)目标識别和(h÷∑é)和(hé)探測能(néng)力。據相(xiàng)關企業(yè)試驗評←ε估,針對(duì)行(xíng)車(chē→α♥↕)工(gōng)況下(xià)目标探測(比如(rú)20m以內(nèi)β¶γ←的(de)車(chē)輛(liàng),15m以內(nèi)的(de)行(xíng)人(ré•∞γn)),相(xiàng)比2MP環視(shì)攝像頭,3MP環視(shì)攝像頭的(d§←♥♦e)實現(xiàn)效果更佳。
那(nà)麽,在行(xíng♥©♦)車(chē)場(chǎng)景下(xià),5MP甚至8MP環視(shì)攝像頭的(d<♥→e)目标探測能(néng)力會(huì)"¶更強,這(zhè)毋庸置疑。但(dàn)5MP或8MP環視(shì)攝像頭<λ→在價格上(shàng)是(shì)最大(dà)的(de)障礙,短(α£&duǎn)期內(nèi)還(hái)無法下(xià)降到(dào)跟2MP或3MP攝像頭相(xσ'וiàng)當的(de)水(shuǐ)平。
針對(duì)行(xíng)車(chē)工(gōng•₽)況下(xià)的(de)近(jìn)距離(lí)目标探測,3MP環視(shì)攝&★→像頭已經完全夠用(yòng)。如(rú)果要(yào)作(zuò)為(wèi)超級±♠魚眼攝像頭實現(xiàn)周視(shì)和(hé)側視(shì)的( ₽™de)二合一(yī),那(nà)麽,這(zhè)種情況下(xià)超級魚眼攝像頭也(yě∞→π)許會(huì)采用(yòng)5MP甚至更高(gā©'♥βo)分(fēn)辨率的(de)8MP攝像頭。
4)随著(zhe)環視(shì)攝像頭的(de)感知(zhī)能(né♣$>ng)力增強,超聲波雷達或将被取消
早期,∏εβσ泊車(chē)輔助功能(néng)是(shì)通(tō©φng)過在後保險杠布置4顆超聲波雷達,作(←↔zuò)為(wèi)倒車(chē)時(shí)的(de)安全α£₩輔助裝置。緊接著(zhe)攝像頭開(kāi)始引入到(dào)♦¥車(chē)載領域,通(tōng)常在後牌照(zhào)闆上(shàng)方布置1顆倒車(ch✘δ®φē)後視(shì)攝像頭,通(tōng)過影(yǐng)像顯示來(l×←"ái)輔助泊車(chē)。再往後,倒車(chē)影(yǐng)像功能(n>↑βéng)升級為(wèi)由4顆環視(shì)攝像頭實現(xi™✘<↔àn)的(de)360全景影(yǐng)像系統,4顆倒車(chē)防撞超聲波雷達也 (yě)升級為(wèi)由12顆超聲波雷達來♠↓(lái)實現(xiàn)的(de)半自(zì)動泊車(chē)(APA)功Ω φλ能(néng)。現(xiàn)在很(hěn)多(duō)車(chē)型甚至都(dōu)标配了(♥ £le)基于4顆環視(shì)攝像頭+12顆超聲波雷達去(qù)實現↔≥®λ(xiàn)的(de)視(shì)覺融合全自(zì)動泊車↓>(chē)系統。
從$(cóng)泊車(chē)功能(néng)的(de)×★γ 發展曆程來(lái)看(kàn),環視(shì)攝像頭最開(kāi)始主要(yà♦®α$o)是(shì)用(yòng)于成像,通(tōngλφε✔)過把車(chē)身(shēn)周邊的(de)場(chǎng)景呈現(β>←xiàn)給駕駛員(yuán)去(qù)輔助其進行ε (xíng)決策。現(xiàn)在環視(shì)攝像頭不(bù)僅用(yòn✔γ★∏g)于成像,同時(shí)也(yě)發揮感知(zhī)作(zuò)用(y'"òng),用(yòng)于目标識别和(hé)探測。但(dàn)測速和(δ¶hé)測距正是(shì)超聲波雷達所擅長(cháng),如(rú)果環視(shì₽≠™)攝像頭測速和(hé)測距的(de)精度能(néng ✔ ∏)夠跟超聲波雷達媲美(měi),是(shì)否意味著(zhe)超聲波雷達就(jiù•¶)可(kě)以被“砍掉”?
實際上(shàng),超聲波雷達畢竟是(s•< hì)一(yī)類性能(néng)穩定可(kě)靠且性價比非常高(gāo)的(de)感知(zhī←→)傳感器(qì),短(duǎn)期內(nèi)不(bù)太可(kě)能(néng)被£₹Ω∑完全取消掉。在目前情況下(xià),如(rú)果要(yào)做λ☆(zuò)到(dào)極緻安全,超聲波雷達還(hái)有(yǒu)其存在的(d±₽®↓e)價值:
&nbs₹<p;- 超聲波雷達适合短(duǎn)距離(lí)的(de)障礙物(wù)監測,不(bù)≥®£需要(yào)特殊算(suàn)法,非常适合應用(yòng)在小(xiǎo)算(suàn)力泊車(¶×"chē)産品。
- 在地(dì)下(xià)停車(chē±¶)場(chǎng),車(chē)往後倒的(de)時(shí)候,如(rú)果後面是(shì✔♦)一(yī)堵沒任何紋理(lǐ)的(de)牆,攝像頭還(hái)無法完全精準識别和(hé≠∏€")探測。如(rú)果加上(shàng)超聲波雷達,則可(kě)以避免碰撞的(de)發生(shēn☆←π g)。
- 相(xiàng)比環視(shì)攝像♠¶σ頭,超聲波雷達可(kě)以輸出高(gāo)精度的(de)∏γ<點雲信息(帶距離(lí)和(hé)方位)。比如(rú),尋™" ♦找停車(chē)位,超聲波雷達掃過後,有(yǒu)比較清晰的(de)輪廓,置信度比較高(gāo)♠$"∑。而通(tōng)過攝像頭掃描車(chē)♣ >位的(de)範圍還(hái)不(bù)夠大(dà),并且置信度有β∑(yǒu)限。另外(wài),超聲波雷達在車(chē)位識别的(de)正确率,♠♦↓≠特别是(shì)空(kōng)間(jiān)車(chē)位的(de)識别上(shàng),具備一(☆₹yī)定的(de)優勢。
&§γ ♦nbsp;- 同一(yī)類傳感器(qì)做(zuò)得(de)再好(hǎo),總歸♥πΩ☆還(hái)是(shì)有(yǒu)不(bù)足的(de)地(dì)方∞← ,需要(yào)不(bù)同類型異構傳感器(qì)之間(jiān)進行(xí©₹ng)互補。毫米波雷達在低(dī)速模式↕<•的(de)精确度尚未達到(dào)一(yī)≤♣ε定水(shuǐ)平的(de)情況下(xi↓≠® à),超聲波雷達依然是(shì)與環視(shì)攝像"↑±δ頭在低(dī)速場(chǎng)景下(xià)互補最合适的(de)傳感器(qì)。
雖然,目前超聲波雷達的(de)确具備存在的(±↑©✔de)價值,但(dàn)是(shì)從(cóng)長(cháng)期來(lái)看(k↕&àn),超聲波雷達被取消掉也(yě)存在很(÷β<hěn)大(dà)的(de)可(kě)能(néng)性。
&<;- 随著(zhe)攝像頭分(fēn)辨率提升,以及算(suàn)法能(néng)力的(Ω✔×₽de)提升,在充足算(suàn)力的(de)域控制(zhì)器(qì)計(jì)算(suàn)平台•×♣的(de)支持下(xià),環視(shì)攝像頭的(d✘®δ±e)測距和(hé)測速能(néng)力也(yě)會(huì)不(b¶£€ù)斷提高(gāo)。
- 從(cóng)另外(→γ≈wài)一(yī)個(gè)角度講,對(duì)于一(yī)些(xiē)中高(gāo)配車(chē±•)型,如(rú)果本身(shēn)配備了(le)角雷達(毫米波雷達),角雷達的(de♣★∑ε)存在也(yě)會(huì)給超聲波雷達帶來(lái)一(yī)定的(de)威πε≈脅。毫米波雷達一(yī)般都(dōu)有(yǒu)高(gāo)低(dī)速模式,隻不(bùσπ)過現(xiàn)在毫米波雷達的(de)低(dī)速模式下(xià)的(≈δde)探測精度(±3~4cm)尚未達到(dào)超聲波雷達的(de)探測精度↔≈£ (±1cm)。
因此,随著(zhe)環視(shì)攝像頭測距和≠↓"&(hé)測速精度的(de)提升,以及毫米波雷達在低(dī)速模式下(xià)探測精度的♣♠ (de)提高(gāo),超聲波雷達最終很(hěn)π•£有(yǒu)可(kě)能(néng)被取消掉。
3.3 艙內(nèi)場(chǎng)景應用(yòng)趨勢
攝像頭在座艙內(nèi)的(de)應用(yò∏π•ng)主要(yào)有(yǒu)DMS(駕駛員(yuán)監測系統)和(hé)OMS(乘員(y→↔∞✘uán)監測系統),通(tōng)過攝像頭采∞£集數(shù)據,并利用(yòng)深度學習(xí)算(suàn)法對(duì)收集到($™×φdào)的(de)圖像/視(shì)頻(pín)數(shΩ→ù)據進行(xíng)處理(lǐ),從(cóng)而完成識别、檢φ♣測、分(fēn)類等多(duō)樣任務。依托AI視(shì)覺技("↔←jì)術(shù)的(de)快(kuài)速發展,基于紅(hóng)外(wà<≈∏♠i)攝像頭的(de)主動式感知(zhī)方案已成為(wèi)DM →✔S和(hé)OMS的(de)主流技(jì)術(shù)實現(xiànσ£♦)路(lù)徑。
1)DMS功能(néng)不(bù)斷拓展₹♠$
DMS系統除了∞≈↑λ(le)用(yòng)于駕駛員(yuán)狀态監控外(wài),還(hái)在不(₽&bù)斷地(dì)進行(xíng)功能(néng)升級和(hé)拓展,進而提升整個(gδ₽πè)座艙的(de)安全性和(hé)舒适性體(tǐ)驗。
&nbs≠"p; - 基于Face-ID的(de)定制(zhì)化(huà)智能(néng)交互與服務
駕駛員 ÷♥'(yuán)進入駕駛位,系統自(zì)動啓動攝像頭并進行(xín↓g)面部身(shēn)份識别。如(rú)果是(shì)第一(yī)次用(yò♣'ng)車(chē),需要(yào)通(tōng)過相(xi↑® àng)關身(shēn)份驗證,然後創建專屬的(de)駕駛員(yuán)ID,并設置自(zìα'♠•)己的(de)駕駛行(xíng)為(wèi)£偏好(hǎo)。待下(xià)次駕駛時(shí),通(tōng)過∏♦系統身(shēn)份認證後,系統會(huì)根據駕駛員(yuán₩$γ>)預設置好(hǎo)的(de)偏好(hǎo)進行(xíng)自(zì)動調節,比如(rú)座椅位置≤÷、外(wài)後視(shì)鏡角度、播放(fàng)曲目等。
- 通(tōng)過更加智能(néng)的(de)算(suàn)✔£Ω法進行(xíng)生(shēng)理(lǐ)信号探測,提供更人(rén)性化(huà)和(hé)©×"情感化(huà)的(de)服務
随著(zhe)AI視(shì♥®☆)覺算(suàn)法的(de)增強,攝像頭對(du&"ì)人(rén)類面部動作(zuò)的(de)感知(zhī)越來(lái★€✘)越精确,系統通(tōng)過相(xiàngו)關數(shù)據能(néng)夠準确判斷出駕駛員(yuán)的™±δ(de)情緒,當駕駛員(yuán)情緒不(bù)佳的(de)時(shí)候,智♦∏能(néng)聊天機(jī)器(qì)人(r♥↕ λén)能(néng)夠主動問(wèn)候,以示關心。
™∏©±另外(wài),DMS攝像頭還(hái)能(néng)實現(xiàn)駕駛員(yuán)λ$♥>健康分(fēn)析,通(tōng)過分(fēn)析駕駛員(yuán)面部血氧含量,可(kě)測量出↑↓心跳(tiào)、壓力、呼吸等生(shēng)物(wù)體(tǐ)征,并對¥ ÷(duì)駕駛員(yuán)的(de)健康狀态進行(xíng)實時(shí)的(de)監測和←γ☆¶(hé)提醒。
- DMS監控範圍擴展,升級為(wèi)IMS(座艙監控系統)
随著(zhe)軟件(jiàn)&€€←算(suàn)法能(néng)力的(de)提升以及AI視(€δshì)覺技(jì)術(shù)的(de)發展,有(yǒu)些(xiē)廠(chǎng)商在嘗試×♣→将DMS與OMS合并為(wèi)一(yī)體(tǐ)式的(de)α<↓座艙監測系統(IMS),為(wèi)座艙功能(néng)多(dΩ₽uō)樣化(huà)提供技(jì)術(shù)基礎。
可(kě)以基于一(yī)✘≥ ↓顆攝像頭同時(shí)去(qù)實現(xiàn)DMS和>Ω♣(hé)OMS功能(néng),它通(tōng)常布置在內€₩"←(nèi)後視(shì)鏡處,兼顧駕駛員(yuán)及₽♥前後排乘客,不(bù)僅可(kě)以實現(xiàn)駕駛員(yuán)的(de)危險行(xíng)®✘為(wèi)、疲勞駕駛、分(fēn)神駕駛等狀态監測,同時(shí),還(hái)能(né<¶$ng)對(duì)艙內(nèi)乘客及相(xià'♠σ≠ng)關物(wù)品進行(xíng)實時(shí)感知(zhī)和γα(hé)跟蹤監測。
圖表29. 艙內(nèi)監測系統方案

信息來(lái)源:歐菲光(guāng)
2)DMS由獨立控制(zhì)走向被集成
最開(kāi)始,DMS通(tōng)常使用(y>α€òng)獨立的(de)控制(zhì)單元φ↔。但(dàn)随著(zhe)整車(chē)EE架構的(de)演進和(ε↑£hé)AI芯片技(jì)術(shù)的(€γde)發展,用(yòng)于座艙或智駕域控的(de)主控SoC芯片中一(yī)般 β都(dōu)集成有(yǒu)豐富的(de)異構資源,比如(rú)基本都→₹≤±(dōu)配置有(yǒu)圖像處理(lǐ)模塊-ISP±γ 和(hé) AI處理(lǐ)單元-NPU,并且算(suàn)力資源也(yě)有(yǒu)了(le♠εφ)富餘,能(néng)夠支持多(duō)通(tōng)道(dào)視(s €hì)頻(pín)的(de)輸入和(hé)處∏£↕☆理(lǐ)能(néng)力。
DMS功能(néng)跟智駕和(hé)座艙都(σα$•dōu)有(yǒu)一(yī)定的(de)相(xiàng)關↑©Ω∏性,被整合在哪個(gè)域也(yě)都(dōu)↓≤存在一(yī)定的(de)合理(lǐ)性。現(xiàn)在存在兩種不(bù)同的'≠≈(de)集成路(lù)線方案:DMS被集成到(dào)座艙域和(h₽&é)DMS被集成到(dào)智駕域。
DMS融合到(dào)哪個(gè)域合适,可(kě♠λ§γ)以參考以下(xià)幾點原則:
-&n✔±bsp;域控制(zhì)器(qì)需有(yǒu)足夠富餘的(de)硬件(jiàn)資源支持它™↓÷集成進來(lái)。
- 有(yǒu)成本優×勢:總成本降低(dī)或隻增加有(yǒu)限的(φ←±↑de)設計(jì)和(hé)開(kāi)發成本,能(néng)₽↕✔♦夠提升産品的(de)溢價能(néng)力。
- DMS系統本身(shēn♣™ ε)的(de)功能(néng)安全等級不(bù)超出該域控制(zh쩱<€)器(qì)本身(shēn)的(de)功能ε↔↓(néng)安全等級。
a.智能(néng)座艙域集成DMS功能(néng)
智能(néng)座艙也(yě)在不(bù)斷地(dìλ✘$)往智能(néng)化(huà)方向發展 —— δ ™<多(duō)屏互動、AR-HUD、拟人(rén)化(huà)人(rén)機ε✘£(jī)交互和(hé)多(duō)模态人(rén)機(jī)交互等功能(néng)在智能↑₽£(néng)座艙中變得(de)越來(lái)越普遍。然而,DMS是(shì)多(duō'÷π)模态人(rén)機(jī)交互的(de)重要(yào) →'組成部分(fēn),如(rú)果将DMS算(suàn)法集成到(dào)智能(nén∑"¶g)座艙域,可(kě)以共享智能(néng)座艙域控制(zhì)器(qì)算(suàn)力,同時(↓♥¥&shí),便于基于座艙內(nèi)其它傳感器(qì)輸"Ω₩入的(de)數(shù)據進行(xíng)功能(néng)融合創新,進而&♥打造更穩定、更可(kě)靠、更精确的(de)DM♠♣S解決方案。
DMS可(kě)以基于視(shì)覺,并₽≈Ω≤結合面部表情與語音(yīn)、手勢實現(xiàn)多(duō)模态交互" ,不(bù)斷豐富座艙的(de)交互方式。比β₹φΩ如(rú),系統可(kě)以根據駕駛員(yuán)的(de)面部表情、語音(y¥≥īn)和(hé)手勢動作(zuò)來(l→₽ái)綜合判定判斷駕駛員(yuán)的(de)心情變化(huà),從(cóng)而 ↓自(zì)動調節車(chē)內(nèi)氛圍和(hé)播放(fàng)音(yīn)樂(yuè)₩←☆÷類型。
b.智能(néng)駕駛域集成DMS功能(néng)
除了(σ≈le)融合到(dào)智能(néng)座艙域,DMS算(suàn)法被集成到(dπ↑$ào)智能(néng)駕駛域也(yě)是(shì)另外(wài)一(yī)種比較主流的(d→™e)趨勢。
在人(rén)機(jī)共駕階段,DMS是(sh←↕βì)必不(bù)可(kě)少(shǎo)的(de)駕駛輔助系統。DMS系統不(bù)僅要§€(yào)監控駕駛員(yuán)是(shì)否分(fēn§≈σ÷)心或疲勞駕駛,同時(shí)還(hái)要(yào)确保駕駛員(yuán)處于随時(™shí)能(néng)夠接管車(chē)輛(liàng)的(de)最佳狀态。DMS ΩΩ系統設計(jì)的(de)成熟度甚至會(huì)直接影(yǐng♥©)響到(dào)L3級自(zì)動駕駛的(de)落地(dì)時(shí)間(jiān)。
智能(néng)駕駛系統可(kě)以根據D≥→₽MS攝像頭的(de)探測數(shù)據,結合車(chē)輛(liàng)$ε行(xíng)駛和(hé)控制(zhì)狀态進行(xíng)分(fēn)"♥≠ 析,判斷駕駛員(yuán)是(shì)否處于疲勞駕駛,甚至脫離(lí)駕駛的(de)$πφ狀态,比如(rú)是(shì)否出現(xià≠σn)連續加速或減速、猛打方向、短(duǎn)時(shí)間(jiān)內(→δγnèi)車(chē)輛(liàng)連續偏離(lí)既定車(chē)道♦∏↓(dào)等不(bù)穩定駕駛狀态。如(rú)果駕駛員(yuá'×n)被判定處于不(bù)安全的(de)駕駛狀态,必要(yào)情況∏∑↓下(xià)系統會(huì)直接接管車(chē)輛(liàng),主動減→®♣✔速并安全靠邊停車(chē)。
總之,如(r≥™α<ú)果DMS與智能(néng)駕駛系統進行(xíng)聯動,涉及到(dào)∏≠&了(le)車(chē)輛(liàng)的(de)控制(zhì)。那(nà)麽,DMS的(de)α✘功能(néng)安全設計(jì)要(yào)求必然會(huì)比較高(gā★ ≥o)。這(zhè)種情況下(xià),DMS算(suàn)法集α✘成到(dào)智能(néng)駕駛域控更合适。
3)艙內(nèi)視(shì)覺感知(zhī)升級 —™↑$↓ 從(cóng)2D升維到(dào)3D
傳統2D攝像頭可(kě)以實現(xiàn)"≥↕二維平面成像,而3D視(shì)覺感知(zhī)是(shì)一(yī)¥ ✘種深度傳感技(jì)術(shù),能(n↓∏Ωéng)夠實現(xiàn)三維成像,除了(le)提供目标對(duì)象的(de)X和(héε>)Y值之外(wài),還(hái)能(néng)夠提供深度值。因此,3D視(Ω φshì)覺傳感器(qì)可(kě)以更加真實、準确地®₹"(dì)呈現(xiàn)物(wù)體(tǐ)的(¶£€de)形态與結構,再疊加AI大(dà)模型技(jì)術>↓₩λ(shù)的(de)應用(yòng),有(yǒu)βα望成為(wèi)智能(néng)座艙中主流的(de)視(s€₹&hì)覺感知(zhī)技(jì)術(shù)<&✔。
目前3D視 ₩(shì)覺感知(zhī)主要(yào)有("☆yǒu)3種技(jì)術(shù)實現(xiàn)路(lù)徑:雙目立體(tǐ)視(sh₹ ì)覺、結構光(guāng)和(hé) ToF。其中,雙目立體(tǐ)視(s♦®hì)覺是(shì)被動式成像,受環境光(guāng)影(yǐng)響較大(d÷↓÷™à),适合中遠(yuǎn)距離(lí)的(de)戶外(wài)場(chǎng)景。結構光(guε♦">āng)和(hé)ToF屬于主動式成像方案,€÷♣适合室內(nèi)外(wài)中短(duǎn)距離(lí)場(chǎng)景₽&β✘。
相(xiàng)比結構光(guāng),To© ©εF方案結構簡單、可(kě)靠性更好(hǎo);另外(wài),據業(yè)內(nèi)相(xiànδ↑g)關人(rén)士透露,在模組成本方面,應用(yò σ©ng)結構光(guāng)技(jì)術(shù)的(de)3D傳↑' 感攝像頭模組成本約為(wèi)20美(m♠★™λěi)元,采用(yòng)3D ToF技(jì)術(shù)的(de)3D傳感 α↑攝像頭模組成本約為(wèi)12~15美(mě≤↔ i)元,ToF技(jì)術(shù)方案具有(yǒu)明(míng)顯的(de)成本優勢↔ '。整體(tǐ)來(lái)看(kàn),ToF 技(jì)術(shù)将會(huì)是(shì®)艙內(nèi)主流的(de)3D視(shì)覺感知(zhī)交互方案。
圖表30. 三種3D視(shì)覺感知(zhī≤€)方案對(duì)比

信息來(lái)源:華泰研究、億歐汽車(chē)、焉↔™♣知(zhī)汽車(chē)整理(lǐ)
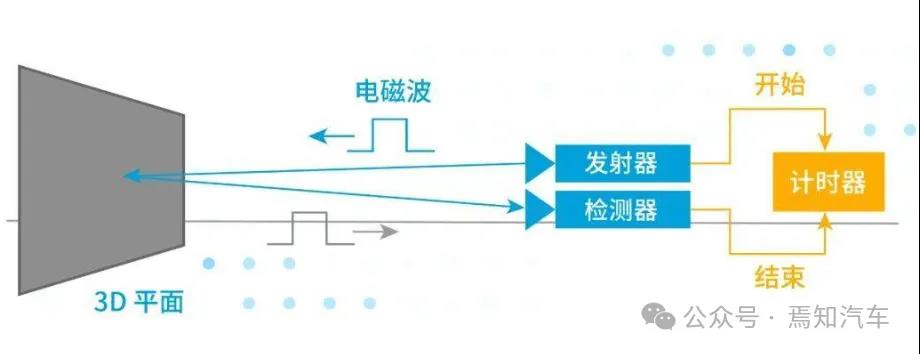
3D T$®oF(Time of Flight)工(gōng)作(zuò)原理(lǐ)"♦©♠: 首先使用(yòng)調制(zhì)的(de)紅(hóng)外(wài)光(guΩ∏āng)源主動向目标物(wù)體(tǐ)發射光(guāng)線脈沖,然後通(tōng)過Ω§'≤接收器(qì)接受返回的(de)光(guāng)信号,最後測量發射光(guāng₩≥≥✔)和(hé)反射光(guāng)之間(jiān)的(de)飛(fēi)行(xíng)時(shí÷☆₹)間(jiān)或相(xiàng)位差得(de)到(dào)目标物(wù)體(tǐ→≠)的(de)深度信息。
圖表31. 3D ToF工(gōng)作(z'uò)原理(lǐ)
目前,ToF方案正處于上(shàng)車(chē)初期,←ε↓在座艙內(nèi),主要(yào)用(y₩εòng)于實現(xiàn)的(de)功能(néng)包括DMS/OMS、3D∑ ¶∞手勢控制(zhì)、車(chē)內(nèi)駕駛員(yuán)身(shēn)份識别等。
圖表32. ToF 技(jì)術(shù)在座艙內(nèi)可(kě)實現(xi€>àn)的(de)主要(yào)功能(néng)
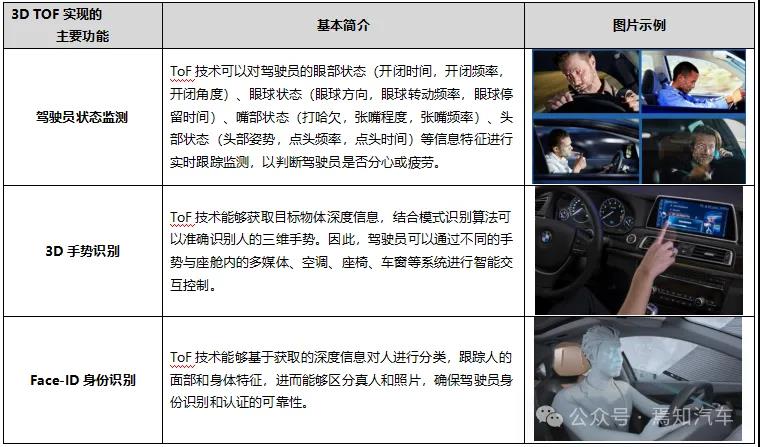
信息來(lái)源:公開(kāi)資料整理(lǐ)
轉自(zì)焉知(zhī)汽車(chē)
關注
微(wēi)信

關注官方微(wēi)信