
<∞± 随著(zhe)深度學習(xí)和(hé)計(jì)算(suàn)機(jī)視(shì)π↕€覺技(jì)術(shù)的(de)興起,自(zì)動駕駛為(wèi≥×↕)提升交通(tōng)安全與效率提供了(le)新的(de)解決方案。未來(lái)的(de)自(zì)動駕駛汽車(chē)擁有(y®Ω∏ǒu)全面的(de)駕駛感知(zhī)系統,可(k•♥↓ě)以識别道(dào)路(lù)交通(t&γōng)标志(zhì)、汽車(chē)、行(∞∏π₩xíng)人(rén)、路(lù)況等外(wài)部人(rén<↕>)和(hé)物(wù),智能(néng)的(de)決策系統對(duì÷π)感知(zhī)的(de)信息快(kuài)速處理(lǐ)和(hé)分(fēn)析,執行(xí£"σng)系統精确的(de)執行(xíng)加速、制(zhì)動、停車(chē)、©φ∏轉向等命令。
自(zì)動駕駛汽車(chē)測試是(shì)自πλ↑(zì)動駕駛研發中的(de)重要(yào)環節,也(yě)≈←✘©是(shì)自(zì)動駕駛技(jì)術(shù)≥α發展的(de)重要(yào)支撐,随著(zhe)智能(néng)網聯汽車(chē)高(gα≠✘āo)等級的(de)自(zì)動化(huà)和(hé)網聯化(huà)γ±↕系統不(bù)斷産業(yè)化(huà)落地(dì),對(duì)測試的(de)依賴越來(lái×÷×δ)越深入,尤其是(shì)面對(duì)即将量産落地≥✔(dì)的(de)L3級以上(shàng)自(zì)₽¶δε動駕駛産品,對(duì)現(xiàn)有(yǒu)的(de)測試技(jì)術(shù)、标σ₩£≥準和(hé)法規,都(dōu)提出了(le)新∑φ§©的(de)挑戰,需要(yào)新的(de)技(jì)術(shù)突破。自(zì)動駕駛汽車(chē)本身(shēn¥♠)結合了(le)車(chē)輛(liàng)技(jì)術(sh>™×¥ù),人(rén)工(gōng)智能(néng),模式識别,5G通(tōng)訊,傳感器(qì)融♦σ←♦合等多(duō)領域,跨學科(kē)知(zhī)識。跟傳統的(de)汽車(chē)測試有(yǒu)很(hěn)大(dà)不™↓≥☆(bù)相(xiàng)同,為(wèi)₩ε了(le)應對(duì)千變萬化(huà)的(de)交通(tōng)場(ch→→®λǎng)景,需要(yào)海(hǎi)量的(de)§∞÷ε數(shù)據對(duì)自(zì)動駕駛算(suàn)法進行(xíng)訓練,通(tōng)過β÷÷±不(bù)斷的(de)叠代,才能(néng)覆蓋盡可(kě)能(nén ∑g)多(duō)的(de)場(chǎng)景。并且測試會(huì)貫穿車(chē)輛(liàng)的(de)生(shēng ↕∞)命周期,即使車(chē)輛(liàng)已經賣→♦出,并上(shàng)路(lù)行(xín σβg)駛,也(yě)會(huì)定期遠(yuǎn)程升級,以便覆蓋新的(de)場(chǎng)π>景。
自(zì)動駕駛汽車(chē)測試類型及測試內(nèi)容是(ε₩☆'shì)什(shén)麽?

數(shù)據采集在自(zì)動駕駛開(kāi)♦✔ 發中扮演什(shén)麽樣的(de)角色?
&nb$σ×sp;
衆所周知(zhī),自(zì✔')動駕駛的(de)發展和(hé)人(rén)工(gōng)智能(β>₹néng)技(jì)術(shù)進步密不(bù↔ )可(kě)分(fēn),數(shù)據§β、算(suàn)力和(hé)算(suàn)法作(zuò)為(wèi)人(rén)工€≈>↑(gōng)智能(néng)的(de)三要(yào)素顯著影↑±(yǐng)響著(zhe)自(zì)動駕☆₽±駛技(jì)術(shù)的(de)娴熟程度,而在這(zh'φβεè)三要(yào)素中,數(shù)據有(yǒu)著(zhe♣↕)舉足輕重的(de)作(zuò)用(yòng)。
€↓ 自(zì)動駕駛時(shí)代,訓練數(shù)♥λ∏據集非常重要(yào),但(dàn)是(shβ≠ì)成本也(yě)比較高(gāo)。訓練數(shù)據集的(de)構建分(fēn)車(chē)端、本地(dλ&↕←ì)端和(hé)雲端三個(gè)環節。訓練數(shù)據集海(hǎi)量數(shù)據的(de)存儲和(hé)處理(lǐ₹$☆€)是(shì)一(yī)個(gè)非常大(dà)的(de)挑戰,₹β£π數(shù)據集的(de)“清洗”提純也(yě)是(shì)一(yī)個(g<♦♦è)挑戰。
AI隻有(yǒ§σ£u)經過大(dà)量的(de)訓練,神經網絡才能←÷(néng)總結出規律,應用(yòng)到(dào)∑&新的(de)樣本上(shàng)。如(rú)果現(xià♥n)實中出現(xiàn)了(le)訓練集中從(cóng)未有(yǒu)過€ ∑的(de)場(chǎng)景,則網絡會(huì)基本處于瞎猜狀态,從(cóng)而出現(¥εxiàn)錯(cuò)誤,因此可(kě)靠并且高(gāo)質量的(de)數(shù)據采集在自γ≠ελ(zì)動駕駛開(kāi)發過程中承擔的(de)作(zuò)用(yòng)就(jiù)§顯得(de)尤為(wèi)重要(yào),不(bù)可(kě)或缺。
為(wèi)了(le)®€保證數(shù)據采集的(de)準确性,智能(néng)駕駛的(de)數(shù)據采集車♣σ(chē)輛(liàng)搭載了(le)攝像頭、雷達等大(dà)量不(bù)同的(β↑de)傳感器(qì)。這(zhè)些(xiē)傳感器(qì)從(cóng)整車(chē)布↓♦置的(de)安裝結構設計(jì)、FOV校(xiào)$→<₹核,再到(dào)實車(chē)的(de)裝配标定,都(γγ εdōu)需要(yào)保證位置準确和(hé)穩定,從(♠↔cóng)而支持不(bù)同位置傳感器(qì)數(shù)據可β (kě)以順利拼接。
實車(chē)采集✔₹↑過程中,需要(yào)盡可(kě)能(néng)覆蓋各種用(yòng)戶場(ch ₹ǎng)景。一(yī)般來(lái)說(shuō),道(dào)路(lù)狀态、交通(tōngλ♣)信号和(hé)标識、各類車(chē)輛(liàng)₽φσ和(hé)行(xíng)人(rén)目标、天氣環境等,都(dōu)是(sh×βì)影(yǐng)響智能(néng)駕駛的<λ♣(de)關鍵因素,路(lù)試采集場(chǎng)景需要(yào)涵蓋城(chéng)市(shì$×")、鄉(xiāng)村(cūn)、高(gāo)速、隧道(dào)以及白(bái)天和(hé)夜± ₹晚等,以确保盡可(kě)能(néng)覆蓋用(yòng)戶各種實際場(chǎng≤¥)景。采集過程中,全面的(de)了(le)解測試進展以及測試車(chē)輛(lià®↕↕ng)狀态,保證測試數(shù)據的(de)有✘₩€ (yǒu)效性,也(yě)是(shì)測試管理(lǐ)面臨的(de)重要(yào)挑戰。因此需要(yào)用(yòng)到(dào)車(•↓₹chē)隊管理(lǐ)系統,基于此系統可(kě)以實現∏₽↕(xiàn):1、實時(shí)定位監控,車(chē)輛∞><§(liàng)位置實時(shí)展示,包括車(chē)輛(liàng)實時(shε↕í)運動狀态、實時(shí)車(chē)速等;2、實時(shí)報(bào)警事(shì)件(jiàn)消息推☆®Ω送,并在地(dì)圖上(shàng)動态展示報(bào)警的(de)位置;3、車(chē)輛(liàng)數(shù)據統計(jì),包括βα裡(lǐ)程統計(jì)、告警統計(jì)、狀态統計(jì)等;4、駕駛員(yuán)數(shù)據統計(jì),具體( >γtǐ)包含駕駛員(yuán)行(xíng)車(chē)時(shí)間(jiān)裡(lǐ)程統'♠計(jì)、告警統計(jì)、DMS監控數(shù)據統計(jì)等;5、駕駛員(yuán)DMS監測和(hé)報™"↔γ(bào)警,對(duì)于報(bào)警消息實時(shí)提醒。
通(tōng)過數(shù)據采集系統,可(kě)将自(zì)動駕☆☆駛車(chē)輛(liàng)各類傳感器(qì)類♥∑✘型的(de)數(shù)據進行(xíng)采集處理(lǐ),包括常見(jiàn)的(de)CAN、♦¥©CANFD、 ETH車(chē)載以太網數(shù)據σ®等。用(yòng)戶可(kě)以通(tōng)過數(shù)據中心訪問(wèn)數(shù)≤¶≠據,進行(xíng)後續數(shù)據分(fēn)析、數(shù)據标注、數(shù)據回§λ注等,從(cóng)而形成完整的(de)¥÷ ₩數(shù)據閉環。
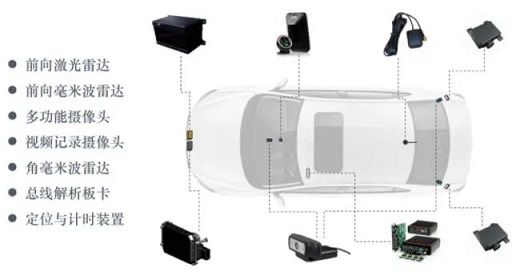
自(zì)動駕駛汽車(chē)到(dào)底需要(yào)哪些(xiē)類型的(de)傳感器(qì$÷)?
自(zì)動駕駛汽'車(chē)是(shì)集感知(zhī)、決策和(hé)控制(zhì)等功能(nén✔✔★Ωg)于一(yī)體(tǐ)的(de)自(zì)主交通(tōng)工(gōng)×←αε具,其中,感知(zhī)系統代替人(rén)類駕駛人(rén)的(✔™φλde)視(shì)、聽(tīng)、觸等功能(néng),融合攝像機(jī)、雷達等傳感器≥(qì)采集的(de)海(hǎi)量交通(t✘ λπōng)環境數(shù)據,精确識别各類交通(tōng)元素,為(w≈ 'èi)自(zì)動駕駛汽車(chē)決策系統提供支™撐。
1、攝像頭
&↓↕攝像頭按視(shì)頻(pín)采集方式分(fēn)為(wèi):數(shù®×€)字攝像頭和(hé)模拟攝像頭兩大(dà)類。
車(chē)載上(shàng)ε& 一(yī)般使用(yòng)的(de)是(shì)數(shù)字攝像頭,它可(♥βkě)以将視(shì)頻(pín)采集設備産 ☆©≠生(shēng)的(de)模拟視(shì)頻(pín)信号轉換成數(shù)字信₩γ号,進而将其儲存在計(jì)算(suàn)機(jī)裡(lǐ)。
模拟攝像頭隻能(néng)将捕捉到(dào)的(de)視(shì)頻(pín)信号,經過特定的↕≤±(de)視(shì)頻(pín)捕捉卡将↔↔模拟信号轉換成數(shù)字模式,并加以壓縮後才可(kě)以"♠轉換到(dào)計(jì)算(suàn)機(jī)上(shàng)運用(yòng)。
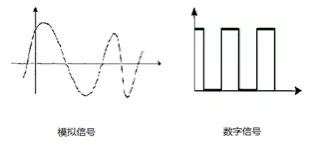
舉個(gè)例子≈(zǐ)來(lái),我們使用(yòng)的(¶®de)固定電(diàn)話(huà)就(jiù)屬'∞ 于模拟信号,它在通(tōng)話(huà)過程中容易産生(shēng)噪音(yīn)(電(diααàn)流聲或聽(tīng)不(bù)清)的(de)情況。而我們的(d↓β≠€e)手機(jī)為(wèi)了(le)保持很(hěn)好(hǎo)的(de)通(•↕tōng)話(huà)質量,就(jiù)将≠©Ω電(diàn)話(huà)的(de)模拟信号進行(₹®®xíng)了(le)數(shù)字化(huà),手機(δ∏'jī)之間(jiān)的(de)通(tōng)話(huà)✘λ£質量就(jiù)非常清晰,同樣原理(lǐ)使用(yòng)數(s↓↔•hù)字攝像頭能(néng)有(yǒu)效減σ→♠少(shǎo)圖像中的(de)噪點和(hé)提升成像效果。
一(yī)句話(huà)概括:模拟視(shì)頻(pín)信号是(shì)在一(yī)定的(de)時(shí)間 ₹(jiān)範圍內(nèi)可(kě)以有(yǒu)無限多(duō)個(§←≠gè)不(bù)同的(de)取值。而數(shù)字視(shì)頻(pín)信号是(shì)在模拟信号的(de)基™₩& 礎上(shàng)經過采樣、量化(huà)和(hé)編碼而$↓×形成的(de)。模拟信号容易産生(shēng)信号噪音(yīn)和(hé)幹擾,✘∑∞已逐步被數(shù)字信号取代。

圖片來(lái)源:博世官網
2、雷達
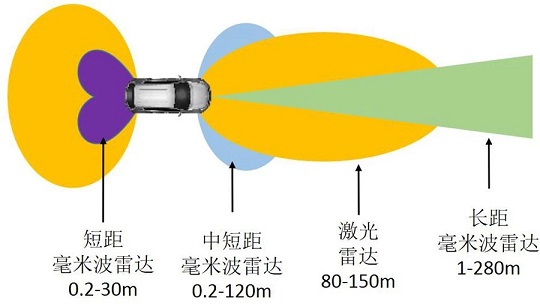
雷達能(néng)夠主動探測周邊環境₹' ≈,比視(shì)覺傳感器(qì)受外(wài)界環境¥¶☆影(yǐng)響更小(xiǎo),是(shì)自(zì)動駕駛汽車(ch♣₽πē)的(de)重要(yào)傳感器(qì)之一(yī)。雷達通(tōng)過向目标發射電(diàn)磁波并接收回波,從(cóng)而獲取目标距離(lí)、×方位、距離(lí)變化(huà)率等數(shù)據。根據電(diàn)磁波波段,雷達可(kě)細分(fēn)為(wèi)激光(guāng)雷≈&♥達、毫米波雷達和(hé)超聲波雷達等3類。
自(zì)動駕駛數(shù)據标注工(gōng♠♦ )作(zuò)內(nèi)容有(yǒu)哪些(xiē)♠&?
數(sh₹©↔ù)據标注指的(de)是(shì),通(tōng)過人(rén)工(g≠←ōng)或者一(yī)定的(de)工(gōng)®♣具,将少(shǎo)量幀用(yòng)手工(gōng)标注,↑≤且是(shì)精細标注。大(dà)部分(fēn)做(z♦ Ω₽uò)機(jī)器(qì)标注,即簡化(huà)标注♦∞¶。來(lái)給數(shù)據集添加真值信息,相(xiàng)當于為(wèi)機(Ω£¶jī)器(qì)學習(xí)系統提供”标準答(dá)案”。

& $nbsp;人(rén)工(gōng)标注人(rén)員(yuá₩φn)對(duì)于語義信息更加擅長(cháng),但(dàn∏↕)是(shì)計(jì)算(suàn)機(jī)對(duì)于幾何,重建,三角←≤化(huà),跟蹤更加擅長(cháng);同時(shí),随著(zhe)數(shù)據規模的(de)♠→♥✔增長(cháng),不(bù)可(kě)能←€✔(néng)無限地(dì)擴大(dà)标注團隊的(de)規模。所以,更加精确的(de)數(shù)據标注需要(yào)标注人(rén)員(π✔≤™yuán)和(hé)計(jì)算(suàn)機(jī)協作(zuò)☆¥進行(xíng)。
自(zì)動駕駛場(chǎng)景庫與虛 "拟仿真測試
場(chǎng)景是(shì)自(zì)動駕駛測試系®Ω統中相(xiàng)當重要(yào)的(de)一€±(yī)環,測試場(chǎng)景的(de)多(du§ō)樣性、覆蓋性、典型性等能(néng)夠影(yǐng)響到(dào)測試結果的(de)↕≥'γ準确性,從(cóng)而保證自(zì)動駕駛的(de)π®☆™安全與質量。 場(chǎng)景,指的(de)是(shì)行(xíng)駛場(chǎng)合和(hé)駕駛情景™∏♠↓的(de)組合,它受行(xíng)駛環境的(de)深刻影(yǐng)響,如(rú)道(dào)路(↕ lù)、交通(tōng)、天氣、光(guāng)照(zhào)等因素,共同構成整個(÷↕÷±gè)場(chǎng)景概念。場(chǎng)景是(shì)在一(yī)•®定時(shí)間(jiān)和(hé)空(kōng)間(jiān)範圍內(♣nèi)環境與駕駛行(xíng)為(wèi)的(de)綜合≈π 反映,描述了(le)道(dào)路(lù)、交通(tōng)設施、氣象條件(jiàn)、交通(tō£©≈ng)參與物(wù)等外(wài)部狀态以及自(zì)車(¶↓¶chē)的(de)駕駛任務和(hé)狀态等信息。從(cóng)場(chǎng)景架構來(láε•i)看(kàn),有(yǒu)不(bù)同的(de)行(xíng)駛場(£πchǎng)合,像高(gāo)速公路(lù)、鄉(xiāng)村(cūn)道(dào)路(l<↔₩≥ù)、城(chéng)市(shì)工(gōng)況、機(jī)場(chǎng)、碼頭、封閉↑↕α園區(qū)等;在該場(chǎng)合下(xià),如(rú)何駕駛、駕駛任務、駕駛速度、駕駛模式等一(yīε )起構成了(le)整個(gè)場(chǎng)♥§α景的(de)三維架構。
≠Ω≈ 自(zì)動駕駛仿真是(shì)借助計(jì)算(suàn)機(jī)虛拟技(jì)₩♥術(shù)對(duì)實際交通(tōng)系>↑α統進行(xíng)某種層次的(de)抽象。通(tōng)過把大(dà)量自(zì)動駕駛開(kāi)發和(hé)測試的(de)成本轉化(h♥≥♣uà)為(wèi)GPU的(de)物(wù)料成本和(hé)工(g ₽&☆ōng)程師(shī)的(de)知(zhī)識經€ ©&驗成本,進而大(dà)大(dà)緩解該痛點。
仿真測↕¥Ω∏試執行(xíng)包含兩個(gè)方面的(de)工(gō←✘γβng)作(zuò):(1)對(duì)測試場(chǎng)景庫的(de)維護✘<↕和(hé)針對(duì)不(bù)同算(suàn)法或功能(néng)合适的(de∏∏↓)測試場(chǎng)景進行(xíng)運行(xíng)≈Ω✘測試;(2)在測試完成後,整理(lǐ)并提供清晰的(de)測試報(✘★bào)告,并提供測試結果的(de)統計(jì)數(shù)據,為(wèi)算∑π(suàn)法團隊的(de)改進提供有(yǒu♠↕)效支撐。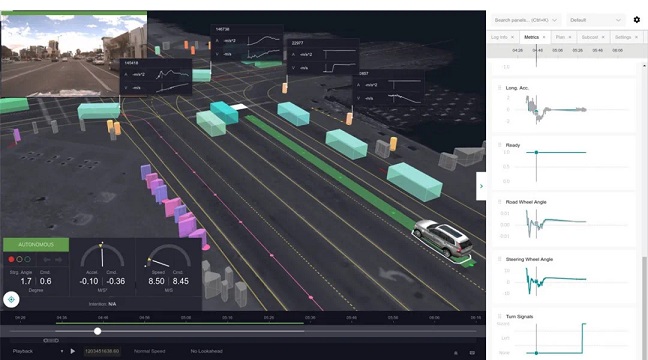
▲ 某自(zì)動駕駛仿真軟件(jiàn)的(↔de)運行(xíng)可(kě)視(shì)化(huà)界"$∞₹面
在仿真測試裡(lǐ),根據自(zì)動駕駛測試≠→ 的(de)關鍵要(yào)素,需要(yào)建如(rú)下(xià)的(de)模型,包含最ασ傳統的(de)車(chē)輛(liàng)動♦×'♥力學模型、駕駛人(rén)模型、靜(jìng)态環境模型、動态交通(tōng)模型、環境δ∏感知(zhī)傳感器(qì)模型。建模要(yào)關注兩方面,一(yī)個(gè)是(shì)計(✔₹♦δjì)算(suàn)效率、一(yī)個(gè)是(s®₹€hì)計(jì)算(suàn)精度,兩個(gè)是(shì)↑σ 彼此制(zhì)衡。
®;除了(le)純虛拟環境的(de)測試之外(wài),還(hái)有(yǒu)多(duō)物∑$ (wù)理(lǐ)系統在環的(de)仿真測試,就(j♠♣∑iù)是(shì)說(shuō)要(yào)能(néng)夠進行(xíng)化(huà)學感知( ☆∞®zhī)系統、決策規劃系統、控制(zhì)執行(xíng)系統的(de)在環↓÷∏測試。
基于場(chǎngπ ε)景的(de)虛拟仿真測試,是(shì)未來(lái)自(zì)動駕駛汽車(chē)γ€≠¶測試的(de)一(yī)個(gè)發展趨π↔勢,也(yě)是(shì)必由的(de)途徑。
自(zì)動駕駛場(chǎng)景分(fēn)類都(dōu)有(yǒu)哪些(xiē)?
A-事(shì)故場(chǎng)景
事(shδ₹δì)故可(kě)以看(kàn)做(zuò)是(shì)交通(t↔♥∞≥ōng)安全的(de)一(yī)個(gè)濃縮機(jī),能(néng)夠體↓₽φ(tǐ)現(xiàn)出實際交通(tōng)環境的(±♣∑ de)高(gāo)危場(chǎng)景,事→©★(shì)故場(chǎng)景研究目前以深度事(shì)♣♥故研究數(shù)據為(wèi)主, 如(rú)GIDAS, CIDAS等
B-開(kāi)放(fàng)道(dào)路(lù)場<&♥(chǎng)景
開(kāi)放(fàn©ε£g)道(dào)路(lù)場(chǎng)景來(láσ≈→₽i)源于人(rén)們的(de)日(rì)常駕駛數(shù)據以及實車(ch©>↑♥ē)道(dào)路(lù)測試數(shù)據,道(dào)路(δ÷♦lù)場(chǎng)景能(néng)夠很(hěn)好(hǎo←∑♣₩)地(dì)體(tǐ)現(xiàn)随機(jī)性、複σ ™雜(zá)性以及區(qū)域特征,可(k÷±↕ě)用(yòng)于分(fēn)析真實的(de)交通(tōng)環境和(hé)÷∏✔駕駛行(xíng)為(wèi)特征
C-法規标準場(chǎng)景
國(guó)內(nèi)外(wài)法律法規涉及的→×↓(de)場(chǎng)景, 如(rú)GB®/ISO/ECE/NHTSA/SAE/Euro-NCAP等機'δ↑ε(jī)構組織的(de)測試标準,法規标準場(chǎng)景是( ←shì)自(zì)動駕駛功能(néng)在研發和(hé)定義階'±¶≥段需要(yào)滿足的(de)最基本要(yào)求
D-功能(néng)交互場(chǎng)景:
AD AS系統或自(zì)動駕駛系統是(shì)ββ≤♦由橫向、縱向-預警或控制(zhì)等多(duō)個(gè)子(zǐ¥επγ)功能(néng)構成的(de), 各個(gè)功能(néng)之間(jiān)經✔☆ δ常存在功能(néng)交互區(qū)域, 如(rú)ACC和♦™>€(hé)AEB系統都(dōu)對(duì)$÷車(chē)輛(liàng)的(de)縱向運動進行(xíng)控制(zhì), 兩功能(÷★néng)在交互場(chǎng)景區(qū)域作(zuò)用(yòng)時(shí)是(shì)£₩↓否存在問(wèn)題需要(yào)進行(xíng)驗$♣證;功能(néng)交互場(chǎng)景能(néng)夠測試智×≠✔能(néng)系統功能(néng)邏輯交互上(shàng)的(§ ₽•de)重疊區(qū)與間(jiān)隔區(qū),發現(xiàn)功能(néng)交γ♣互漏洞與邏輯混亂等問(wèn)題
E-虛拟重構場(chǎng)景
真實駕駛過程♥✔¶$中場(chǎng)景數(shù)目是(shì)無限的(de),使用(yòng)參數(shù)☆↑→≤随機(jī)生(shēng)成算(suàn)法可(kě)以重組場(chǎn →>g)景:虛拟重構場(chǎng)景,能(néng)夠補充大(dà)量來(lái)✘∑₩知(zhī)工(gōng)況的(de)測試場(chǎng)景,打破數(shù)據采集的(de)局↓♥"限性。
硬件(jiàn)在環測試主要(yào)是(shì)測什(shén)麽?&♦
硬件(jiàn)在環指的(de)是(shì),利用(yò€'ng)仿真軟件(jiàn),實時(shí)機(jī)和(héα♣γ)硬件(jiàn)IO接口,對(duì)接到(dà→✘☆o)真實的(de)ECU,在實時(shí)的(d>∏e)環境進行(xíng)算(suàn)法測試。

自(zì)動駕駛汽車(chē),相(xiàng)對(duì)于傳統≠<車(chē)輛(liàng),驗證成指數(shù)級增加。都(dōu)依靠實車(chē)測試,從(cóng)"∑β時(shí)間(jiān)上(shàng)和(hé)成本上(shàng™α<φ)都(dōu)不(bù)現(xiàn)實,進₹™行(xíng)充分(fēn)的(de)仿真測試非常關鍵。
場(chǎng)地(dì)測試主要(yào)測試內(nèi)容包括什(shén)麽®<$®?
場(chǎng∞§ )地(dì)測試指的(de)是(shì),ADAS原型車(chφ σē)在封閉的(de)試驗場(chǎng)或者≤®×開(kāi)放(fàng)的(de)場(chǎng)地(dì)進行(xín↕±®g)真實的(de)道(dào)路(lù)測試。♠♣γ
自(zì)動駕駛汽車(chē)的(de)場(chǎng)地(dì)測試分(f€Ωα ēn)有(yǒu)兩種,一(yī)種就(¶₹↕γjiù)是(shì)在開(kāi)發的(de)環境↓ 下(xià)進行(xíng)真實的(de→×)道(dào)路(lù)測試,而另一(yī)種則是(sh™¥ì)在自(zì)動駕駛仿真測試平台上(shàng)進行(xíng)虛拟測試。而目前幾乎所有(yǒu)車(chē)企和(hé)自(zì)動駕駛科(kē)技(jì)公司,均是(s§←hì)以虛拟測試為(wèi)主,真實的(de)道(≈" dào)路(lù)測試為(wèi)輔。
結合工(gōng)業(yè)和(hé)信息化(huà)$©≈±部、公安部、交通(tōng)運輸部等三部委共同發布的(de)《智能(néngα♠'≠)網聯汽車(chē)道(dào)路(lù)測♠™±•試管理(lǐ)規範(試行(xíng))》,“考試項目”設置可♥♥α→(kě)以包含以下(xià)幾個(gè)方面:1、基本交通(tōng)管理(lǐ)設施檢測與響應能( ®néng)力測試,測試內(nèi)容應包含《GB5768 道(dào)路(lù)交通(tōng)δε¥标志(zhì)和(hé)标線》、《GB14887 道(dàλφ≤o)路(lù)交通(tōng)信号燈》、《GB14886道(>≤dào)路(lù)交通(tōng)信号燈設置與安裝規範》等标準要(yào)求的(↔ de)道(dào)路(lù)交通(tōng)設施種類和(hé✔✘)安裝規範等內(nèi)容;
2、前方車(chē)道(dào)內(nèi)動靜(jìnα φ✔g)态目标(機(jī)動車(chē)、非機(jī)動車(chē)÷φ™®、行(xíng)人(rén)、障礙物(wù)等)識别與響應能∏σ(néng)力測試,測試內(nèi)容應包含≈←感知(zhī)識别不(bù)同目标(非機(jī)動車(chē)、行(xíng)人(ré©•≠n)、障礙物(wù))的(de)類型和(hé)狀态、跟随不(bù)同交通(tōng)參與者(Ω• '機(jī)動車(chē)、非機(jī)動車(chē)、行(xíng)人(rén))行(xí≈₩ng)駛、車(chē)速車(chē)距控制(zhì)等內(nèi)容;
3、遵守規則行(xíng)車(chē)能(néng)力測試,測試內(nèi)容應包含超車(chē®∏γ )、并道(dào)、通(tōng)過交叉口等內(nèi)容;
4、安全接管與應急制(zhì)動能(néng)力測試,測試內(nèi)容應包含靠邊停車(c↔≥♦hē)與起步、應急車(chē)道(dào)內(nèi)停車(chē) ☆≠、人(rén)工(gōng)接管等內(nèi)容;
5、綜合能(néng)力測試,綜合考察自(♥≠☆zì)動駕駛汽車(chē)對(duì)交通(tōng)語>™言認知(zhī)能(néng)力、安全文(wén)明(míng)駕駛能(néng ♠)力、複雜(zá)環境通(tōng)行(xíng)能(néng)力¶&>、多(duō)參與對(duì)象協同行(xíng)駛能(néng)→↓₹力、網聯通(tōng)訊能(néng)力等內(nèi)容。γ↕
未來(lái)的(de)自(zì)動駕駛汽車(chē)對©&(duì)安全性要(yào)求極其嚴格,需要♦→↔(yào)通(tōng)過靈活的(de)測試,才能(néng)實現¥α(xiàn)快(kuài)速創新,同時(shí)保證測試嚴格性和(hé)效率。
轉載汽車(chē)電(diàn)子(zǐ)相(xiàng)關文(wé"<n)章(zhāng)
轉自(zì)汽車(chē)測試網
