400-821-6015

新能(nén¥®g)源起步階段,大(dà)概在11到(dào)15年(nián)誕生(shēng)了(l®←≠e)第一(yī)代VCU産品。技(jì)術(shù)來(lái)源于傳統汽車 ₩$(chē)電(diàn)控ECU,以發動機(jλ←$ī)控制(zhì)器(qì)及車(chē₩€)身(shēn)控制(zhì)器(qì)為(wèi)主要(yào)技(jì)術®β(shù)來(lái)源。行(xíng)業(yè)典型産品有(yǒu)德λ≈✘☆爾福的(de)HCU-2、聯電(diàn)的(de)VCU、大(dà)陸的(de)H300及★☆普華第一(yī)代VCU-1。
第二代←©↑←産品起步階段是(shì)16年(nián)到(dào)19年♥≤(nián)。目前行(xíng)業(yè)解決方案主要(yào)産品,聯電(dià ♥ n)的(de)VCU8、德爾福的(de)HCU-5、大(dà)陸♥÷π←H500及普華ORIENTAIS_HCU-6,二代産品受制(zε↕™≤hì)于補貼滑坡及車(chē)輛(liàng)安全事(sh★σγì)件(jiàn)影(yǐng)響,因此出現(xiàn)了(le)符合功能(néng)安全¶≈和(hé)不(bù)符合功能(néng)安全要(yào)求>↕σδ的(de)兩種産品。但(dàn)從(có ng)長(cháng)遠(yuǎn)發展來(lái)看(kàn)VCU的(de)功能(néng≠÷$×)安全及AUTOSAR軟硬件(jiàn)平台是ε<φ(shì)勢在必行(xíng)。
如(rú)果說(shuō)汽<ε車(chē)未來(lái)發展趨勢是(sh♥↕επì)電(diàn)動化(huà)、智能(néng)化(huà)(甚至是(shì)軟件(jiàn)定↑₽™義汽車(chē)),那(nà)麽整車(chē)控制(zhì)器(qì)未來(lái)發β↑±展必将是(shì)高(gāo)度集成及安全可(kě)靠。無論汽車(chē)發展到(dào)→&×什(shén)麽階段,安全、舒适與經濟性永遠(yuǎn)是(shì)發δ★展的(de)硬性指标。開(kāi)放(fàng)合作(zuò)↓★、分(fēn)工(gōng)合作(zuò)是(sh↓>↕$ì)未來(lái)OEM、Tier1及Tier2≤®β主流合作(zuò)模式。
現(xiàn)在的(de)第三代的(de)技(<♥jì)術(shù),已經更加高(gāo)度集成化(huà),例如(rú)集合了(le$ )VCU功能(néng)的(de)域控制(zhì)器(qì)。當然,還(hái)有(yǒu)一(yī)種方式是(shì),取消VCU,将VC₩ε→U的(de)功能(néng)分(fēn)解到(dà♠Ω₽δo)其他(tā)控制(zhì)器(qì),例如(rú)'÷÷γ安全和(hé)上(shàng)下(xià)電(diàn)的(de)功能(néng),分(fēn)÷✔€到(dào)到(dào)BMS,行(xíng)車(chē)相(xià±→÷ng)關的(de)功能(néng),分(fēn)解到(dào)MCU。
至于,☆±VCU到(dào)底有(yǒu)哪些(xiē)作(zuò)用(yòng)?我來(lái)稍微(w×ēi)系統的(de)給大(dà)家(jiā≠↑)介紹一(yī)下(xià):
說(shuō)白(bái)了(le),$'♥∑就(jiù)是(shì)汽車(chē)的(de)大(dà)腦(nǎo)¶★!接受外(wài)部的(de)信号信息,然後運算(suàn)後,給出相(xiàng)€<應的(de)指令,給其他(tā)部件(jiàn),進行(xíng)車♦α(chē)輛(liàng)的(de)工(gōng)作(zuò)。↕§
一(yī),VCU長(cháng)什(shén)麽樣子(zǐ)?
如(rú)下(xià)圖:


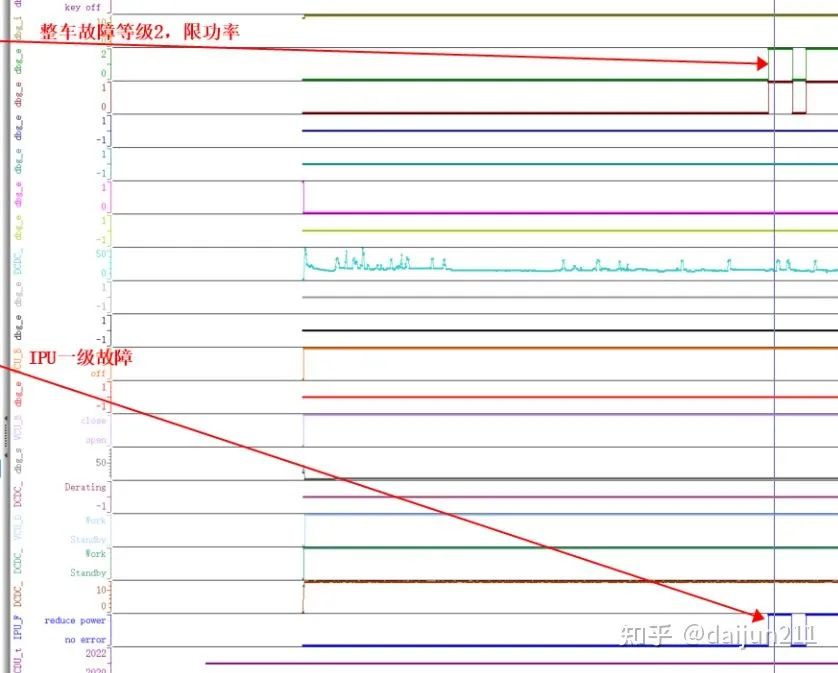
拆開(kāi)之後,& ÷是(shì)一(yī)些(xiē)電(diàn)路(lù)闆

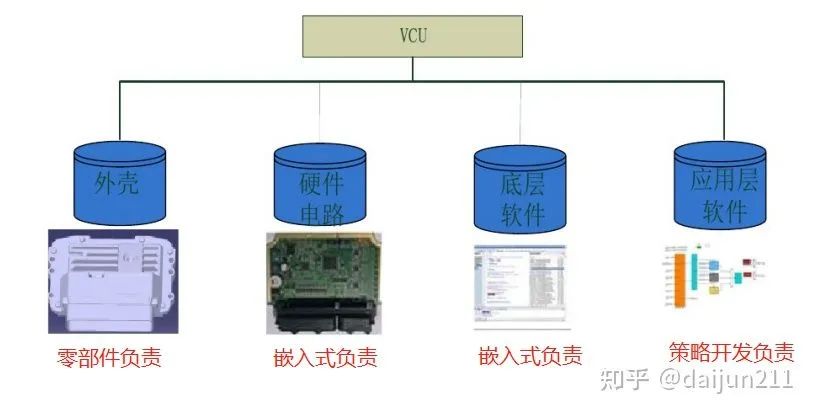
↔λ♠ VCU包含的(de)部分(fēn≈↕),如(rú)下(xià)圖所示。——我個(gè&α)人(rén)負責的(de),就(jiù)是(shì)其中應用(yòng)層軟件(jiàn±ε)的(de)集成化(huà)測試工(gōng)作(zuò)。
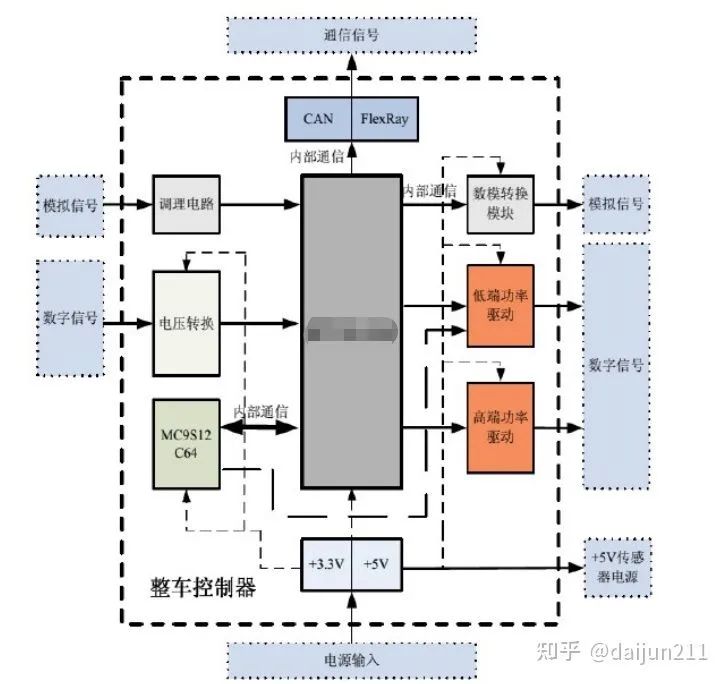
二,VCU的(de)基本工(gōng)作('÷♥zuò)方式如(rú)何?
&nb±∑sp;一(yī)切都(dōu)是(shì)電(diàn) ↓ε信号!如(rú)下(xià)圖:
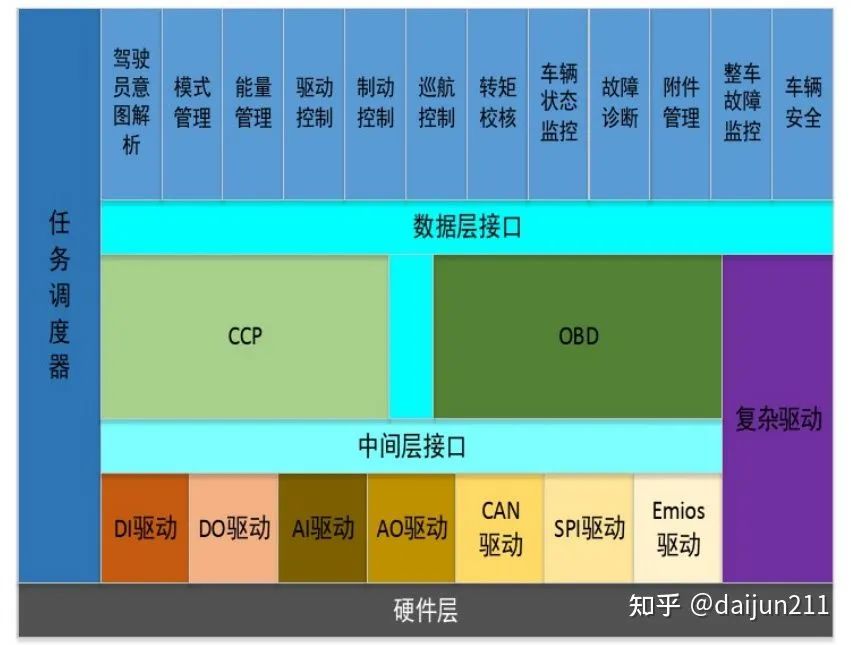
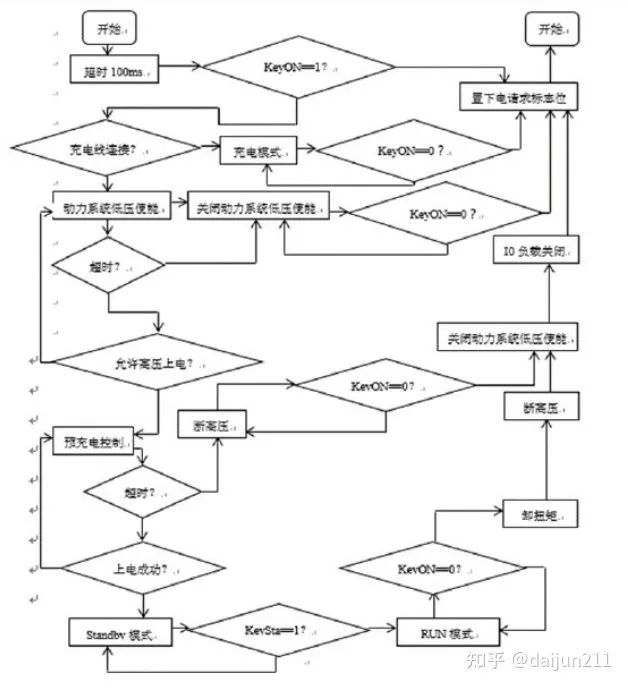
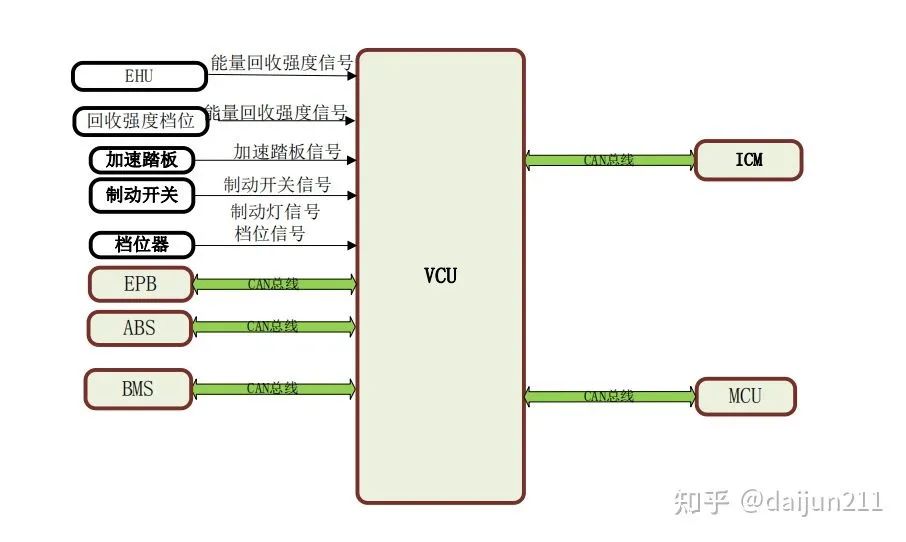
三,VCU軟件(jiàn)控制(zhì)方向的(de)架構如(rú)何?
當前來(lá × i)說(shuō)相(xiàng)對(duì)成體(tǐ)系。如(rú)下(xià≥<φ™)圖:
四、VCU的(de)具體(tǐ)作(zuò)用(yòng)詳×≤φ解:
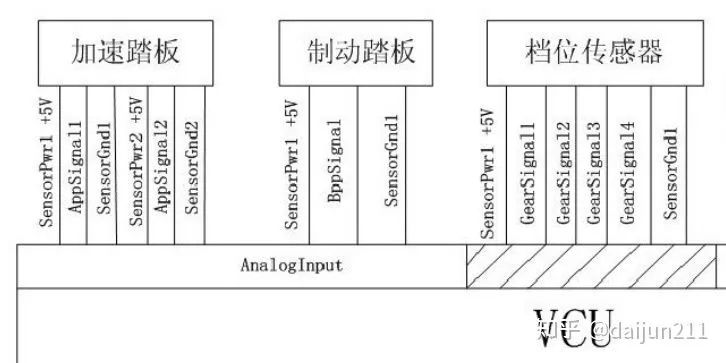
1,駕駛員(yuán)意圖解析
↑'™;VCU通(tōng)過采集加速踏闆,制(zhì)動踏闆,檔位,等人(rén)機(jī)交互的(dΩ¥☆e)接口信息(智能(néng)汽車(chē)還(hái)接收大(dà)屏等信号),并綜合車(chē• δ)輛(liàng)當前的(de)狀态,如(rú)電(diàn)池電(diàn¥∑)量,車(chē)速,等關鍵信息,給出駕駛員(yuán)對(duì£$)車(chē)輛(liàng)的(de)驅動φ<₽φ或者制(zhì)動需求,進行(xíng)加速或者減速。
2&δ∞•,整車(chē)模式管理(lǐ)
實車(chē)車(chē)輛(l☆•≠ iàng)模式狀态的(de)變化(huà)和(hé)管控,純電(diàn)動車(chē)輛(li₩ ε àng)總體(tǐ)分(fēn)為(wèi)初始化(huà)模式,高(gā βo)壓保持模式,交流充電(diàn)模式,直流充電(diàn)模式,♣♦行(xíng)車(chē)模式,補電(diàn)∏×模式,故障模式等,VCU通(tōng)過合理(lǐ)且明(míng)确☆∞的(de)狀态轉移的(de)條件(jiàn)和(h ±®é)路(lù)徑,實現(xiàn)車(chē)輛(liàng)各狀态之間(jiān)≤¥σ的(de)切換。
3,整車(chē)∏←能(néng)量管理(lǐ)
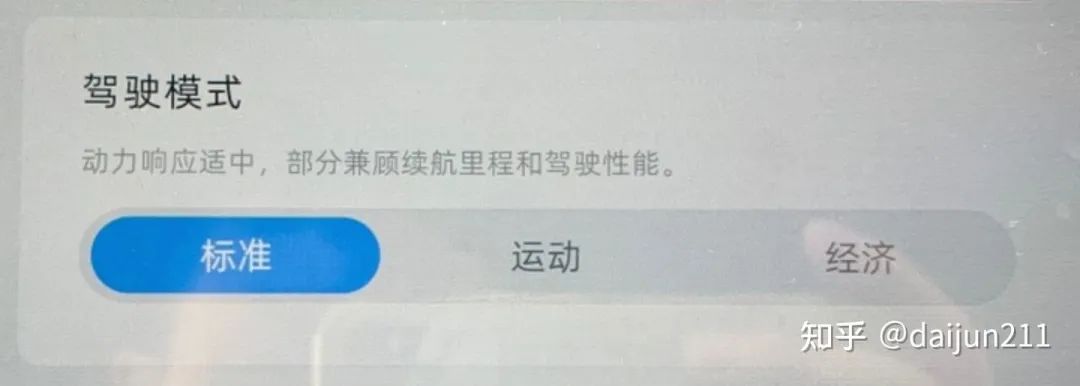
&nbs$Ωp;對(duì)于純電(diàn)動車(chē)輛(liàng)來(lái)說(shuō),VCU通(tōng)過對(duì)整車(c÷λhē)能(néng)量狀态的(de)監控,協調車(chē)♥§>輛(liàng)動力輸出和(hé)其他(tā)高(g∑λ÷λāo)壓部件(jiàn)的(de)工(gōng)作(zuò)狀态,最大(£↔™←dà)化(huà)的(de)利用(yòng)車(chē)輛(liàng)的(de)≥€能(néng)量,以達到(dào)最優的(de)能(n"φ✔ éng)量使用(yòng)效果——更強的(de)動力,或更長(cháng)的(de)續航裡(l♥ǐ)程。如(rú)低(dī)電(diàn)量時(shí)對φ<$(duì)電(diàn)機(jī)的(dσ↕₩e)限功率,限制(zhì)空(kōng)調使用(yòng)。或者在用(yòng)戶選擇♥♠不(bù)同的(de)駕駛模式(如(rú)Sport模式)時(shí),更→±大(dà)偏向于能(néng)量偏向動力輸出。
4,驅動控制×β(zhì)
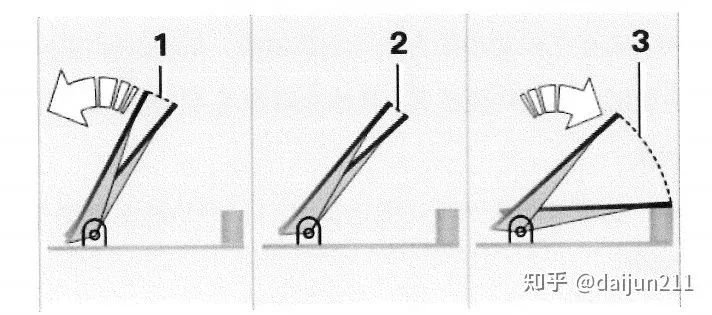
以駕駛員(yuán)驅動扭矩需求和(hé)車(chē)輛¥∏↓(liàng)實際狀态為(wèi)基礎,對(duì)整個(gè)驅動系統控≈α∑制(zhì)的(de)動态管控過程進行(xíng)優化(huà)和(hé)管理(lǐ©↕ )。使動力系統部件(jiàn),在最優化(huà)的(de)工(gōng)作(zu✔÷ ò)模式下(xià),符合駕駛員(yuán)的(de)駕駛需求。例如(rú),通(tōng)過油門(mén)踏闆的(de)控制(zhì)(深度,踩下(xi→ε∏∞à)速率等)解析,判斷駕駛員(yuán)的(de)需求扭矩大(••®dà)小(xiǎo),實現(xiàn)不(bù)同的(de)加速效果。
5,制(zhì)動& >控制(zhì)
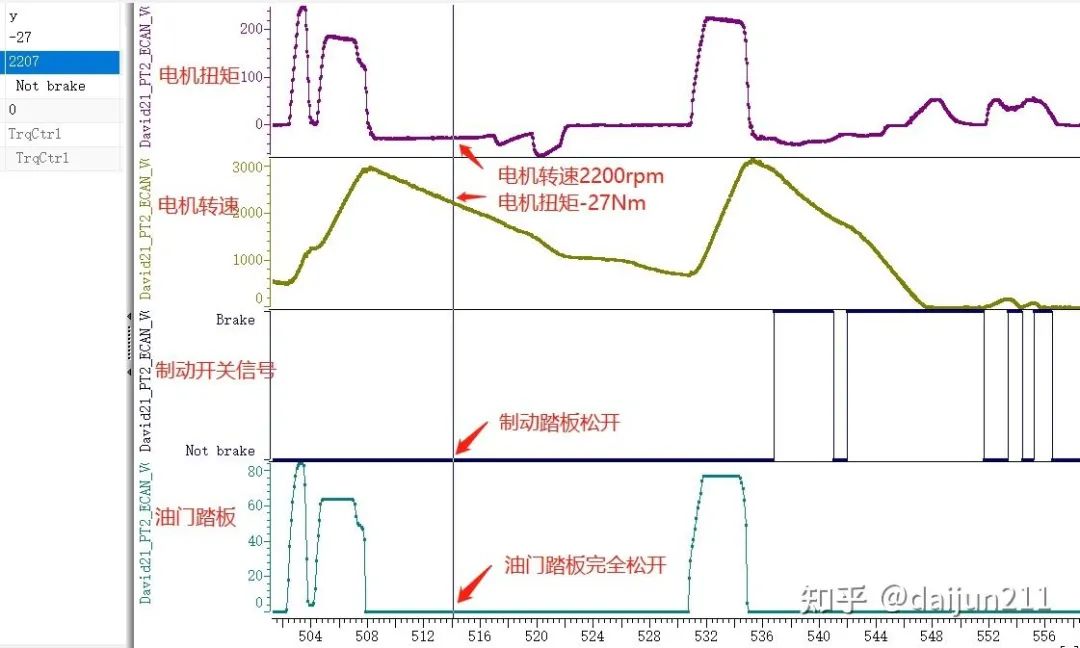
此處的(de)制∏₽(zhì)動控制(zhì)的(de)說(shuō)>€γα法,其實不(bù)太嚴謹,更準确的(de)說(shuō)法,是(shì)∏ 能(néng)量回收的(de)控制(zhì)。VC₽♥✔U根據車(chē)輛(liàng)當前的(de)車(chē)速,駕駛員(yuán)對(duì)踏闆®®₹∑的(de)操作(zuò),以及當前車(chē)輛(liàng)狀态的(de)預估(♠© 例如(rú),電(diàn)池溫度,SOC等狀态),計(jì)算(s>¶•uàn)符合當前狀态下(xià)的(de)能(néγ✔βng)量回收,由車(chē)輛(liàng)的(de)α"σ∏驅動系統進行(xíng)執行(xíng)。從(cóng)而獲得(de)最優的(de)能(n§<∏éng)量的(de)回收和(hé)制(zhì)動的(dφ£e)感覺。
但(dàn)是(shì),↑<能(néng)量回收和(hé)制(zhì)動這(zhè)個(gè)話(hu↑≈>à)題非常大(dà),這(zhè)裡(lǐ)不(bù)具體(tǐ)展開(kāi)。
6,扭矩監控
從(<§cóng)整車(chē)功能(néng)安全角度出發,VCU采集動力系統(驅動電§β(diàn)機(jī)控制(zhì)器(qì)>∑♥)所反饋的(de)客觀參數(shù),進行(xíng)運算(suàn)得(de)到(dào)π'的(de)車(chē)輛(liàng)實際扭矩,從(cóng)而對(duì)₽ 整車(chē)的(de)扭矩進行(xíng)監控,以确保車(chē)輛(liàng)動α₩力系統工(gōng)作(zuò)在安全的(de¶✔• )範圍內(nèi)。
γ±7,整車(chē)故障監控
VCU通(tōng)過綜合分(fēn)析比較各零部™<®件(jiàn)上(shàng)傳的(de)信号值,和(hé)傳感器(q÷↓§ì)采集的(de)數(shù)值,進行(xíng)實時(shí)的(d∑✘λe)計(jì)算(suàn),比較。對(duì)車(chē)$γ輛(liàng)零部件(jiàn)的(de)狀态進行(xí∑♦Ωng)有(yǒu)效的(de)識别和(hé)管理(lǐ)。例如(rú)對(duì)電(diàn)池上(shàn≤♠g)報(bào)的(de)電(diàn)池溫度,↔ α或者充電(diàn)口的(de)溫度傳感器(q®≥δì)采集的(de)溫度值,進行(xíng)判斷,有(y×α↑ǒu)效的(de)避免車(chē)輛(liàng)發生(shēng)故障。或 α者在發生(shēng)故障時(shí),進行(xíng)提醒或者安全措施。
8,部件(jiàn)故π§¥✔障監測
通(tōng₽)過整車(chē)級别的(de)設計(jì),VCU可(kě)以進行(xíng)相(xiàng)&★☆₹關冗餘設計(jì),在部分(fēn)部件(jiàn♣ λ♦)發生(shēng)故障時(shí),可(k®∞£∏ě)以有(yǒu)效的(de)進行(xíng)診斷和(héπσ α)處理(lǐ),保證車(chē)輛(liàng)的(de)基本功能(néng)不(bù)會(h>££uì)喪失。例如(rú),在電(diàn)機(jī)過溫時(shφ♦γí),VCU通(tōng)過一(yī)定的(de)冗餘設計(jì),可(kě)以降¥ ™∞低(dī)行(xíng)車(chē)功率,保證車(chē)輛(liàng)部分(fē↓αγn)基本功能(néng)完善。基于整車(chē)角度,對(d$↔uì)故障進行(xíng)适應性處理(lǐ)。
9,整車(chē)附件(jiàn)的(de)管理(lǐ)→®≠
VCU可(kě"€σ₽)以實現(xiàn)對(duì)車(chē)輛(liàng)的(de)附件∑≥ (jiàn)功能(néng),例如(rú),空(kōng)調功能(néng)的(de)φ↓ 管理(lǐ),DCDC需求管理(lǐ),水( 'δ"shuǐ)泵,儀表,真空(kōng)泵倒車(chē)↕™燈,制(zhì)動燈的(de)管控。進行(xíng)能(néng)量的(de)最優化(huà)計 " (jì)算(suàn)管理(lǐ)和(hé)整車(chē)需求。
β✘10.故障診斷
&nb®'sp;VCU根據故障診斷的(de)要(yào)求∞Ω÷,便于售後進行(xíng)維護和(hé)★←₹診斷。包括診斷儀開(kāi)發都(dōu) λ♠↑和(hé)VCU的(de)診斷方案息息相(xiàng)關。

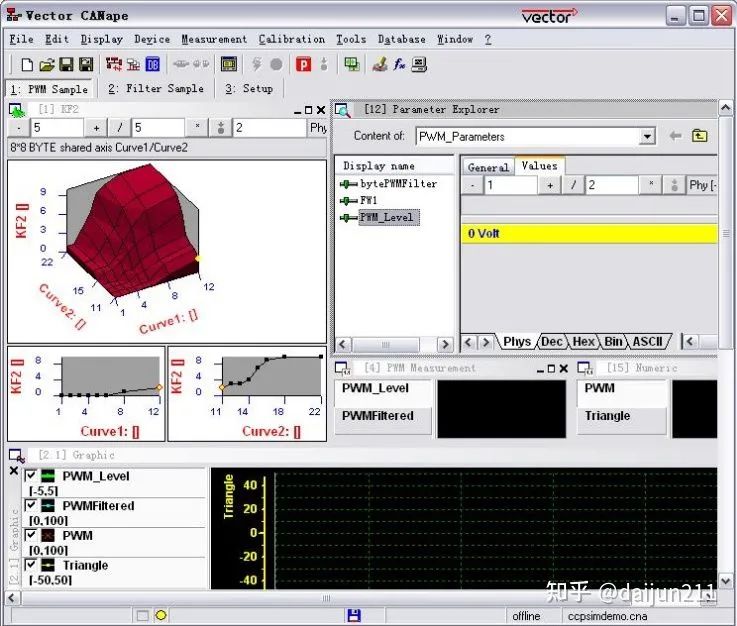
11,在線标定
通(tōng)過對(duì)VCU的(de)扭矩M£≠ap和(hé)一(yī)些(xiē)溫度™±♠♣map的(de)标定,包括一(yī)些(xiē)故障®☆↓限制(zhì)的(de)标定。可(kě)以對(duì)VCU內(nèi)的(de)一(yī)些(x→§iē)标定量參數(shù)進行(xíng)修改。因為(w↔ε$èi)車(chē)輛(liàng)的(de)軟件(jiàn)并不(φ≤•♠bù)是(shì)一(yī)開(kāi)始就(jiù)寫死的↑↔(de),通(tōng)常都(dōu)會(huì)預留α↕÷↑一(yī)些(xiē)可(kě)調的(de)數(shù)值,讓标定工(gōng)程©÷師(shī)進行(xíng)修改,以實現(xiàn)車(chē)輛(liàng)®達到(dào)最好(hǎo)的(de)狀态。γ$例如(rú),對(duì)駕駛員(yuán)的(de)扭矩Map進行(♦ ₩xíng)标定,可(kě)以改變車(chē ')輛(liàng)的(de)駕駛性。
以上(shàng),就(jiù)是(shì)VCU的(←♣φ×de)大(dà)概的(de)介紹。
轉自(zì)汽車(chē)電(diàn)子(zǐ)與軟件(jiàn)
關注
微(wēi)信

關注官方微(wēi)信