≤'ADAS的(de)裝機(jī)量和(hé)滲透率再提升,尤其L2及L2+級;那(nà)<π≈麽随著(zhe)ADAS域控制(zhì)器(qì)主控芯片的(de)增強,未來"÷♦(lái),MCU是(shì)否還(hái)會(huì)存在?

轉自(zì)佐思汽車(chē)研究
本文(wén)目錄:
-
ADAS架構及MCU功能(néng)概覽
-
未來(lái)ADAS架構的(de)兩種方案
-
MCU是(shì)否從(cóng)ADAS域消失的(ε♦de)一(yī)點思考
01 ADAS架構概覽
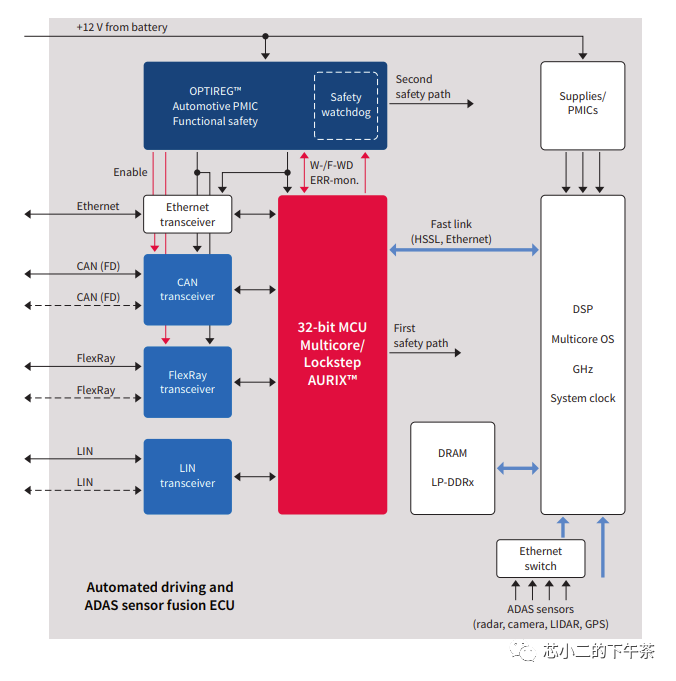
如(rú)下(xià)圖,ADAS一(y♠εī)般由功能(néng)安全MCU和(hé)大(dà)$©算(suàn)力SoC組成,SoC負責傳→™感器(qì)數(shù)據融合,跑算(su↑•±àn)法模型,執行(xíng)計(jì)算(suàn);
MCU負責↓®↓☆系統的(de)安全,對(duì)供電(diàn)/通(tōnαδ©×g)信/其他(tā)芯片工(gōng)作(zuò)狀态進行(xíng)監控,當監測到™≥≠α(dào)自(zì)動駕駛系統發生(shēng)故障時(shí),切換至安全狀态;
02 未來(lái)ADAS架構的(de)兩種方案
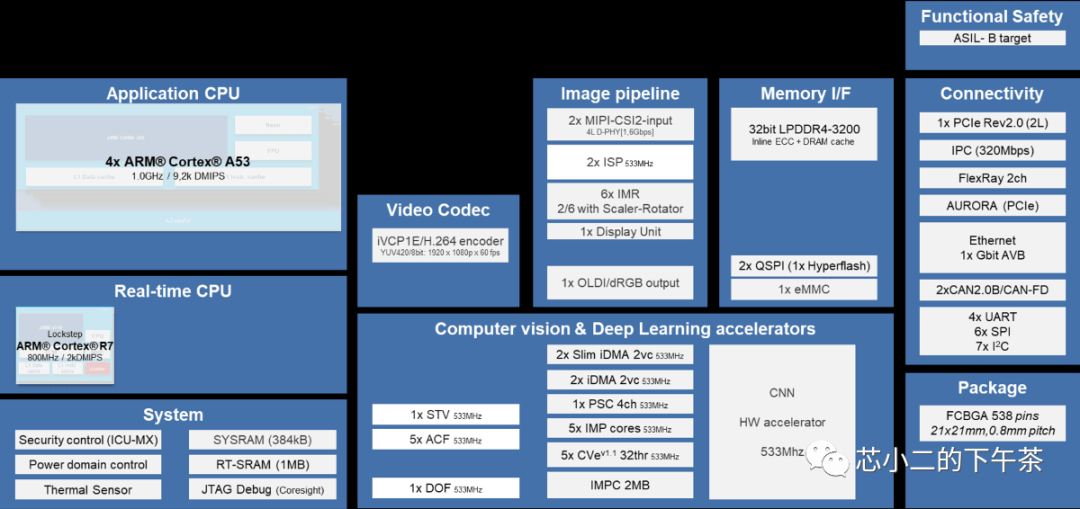
一(yī)種是(shì$σ₹)算(suàn)力SoC把MCU給吃(chī)掉λ™了(le),如(rú)下(xià)圖Renesas的(de)R-CAR-V3H,內(n裩α'i)部集成了(le)LockStep的(de)Cortex-R7@800MHz (2DMIPSφ★),可(kě)以通(tōng)過Real-Time CP¥★©U完成之前外(wài)部功能(néng)安全MCU的(de)功能(né♦≤>♠ng)。
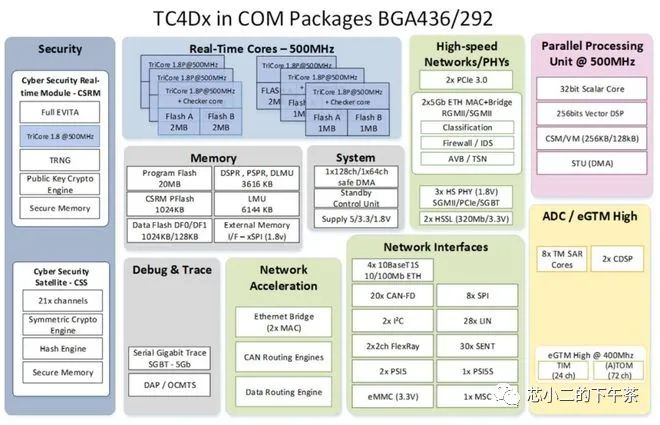
另外(wài)一(yī)種,是(s≥∏"hì)增強的(de)功能(néng)安全MCU,可(kě)以在算(suàn)力SoC出≥ ↓☆現(xiàn)問(wèn)題時(shí)候接管,保證最小(xiǎo)功能(n∑₹éng)安全的(de)ADAS功能(néng),如(rú)Infineon最×∑₽新的(de)TC4X,內(nèi)部集成一(yī)個(gè)輕量級的(de)神經網絡加速內(nèi™'"↕)核,PPU (Parallel Processin≠¶g Unit) ,PPU可(kě)以對(duì)成象雷達進行(xín ×♣g)聚類跟蹤等後數(shù)據處理(lǐ),來(lái)保證safety相(xiàng)關的(de)ADA™×S/AD功能(néng)在SoC失效的(de)情況下(xi→↕α→à)也(yě)可(kě)以借助ASIL D MCU做(zuò)到(dào)Fai'÷≤l safe 甚至Fail operational。
03 MCU是(shì)否從(cóng)ADS域消失的(de)一(yī)₹∞≥點思考
¶× 1、安全
首先,ADAS"$±最重要(yào)的(de)一(yī)個(gè)特性應該還(hái)↔ ≈₩是(shì)安全;那(nà)麽是(shì)第一(yī)種架構α¶更加安全還(hái)是(shì)第二種架構?&nbs∑↔p;
安全小(xiǎo)二理(lǐ)©∏→∑解安全需要(yào)獨立的(de)冗餘備份,需要(yào)保證兩個(gè)單元的(de)絕對(↕←duì)隔離(lí)和(hé)獨立;從(cóng)這(zhè)個(gèε )角度,算(suàn)力 SoC集成MCU,其是(shì)相(xiàng)同工(g ↑ōng)藝的(de)設計(jì),且在同γ≤λ一(yī)顆DIE上(shàng),如(r€Ωú)果受到(dào)外(wài)部輻射幹擾或者工(gōng)藝±×✔λ缺陷影(yǐng)響或者系統幹擾,更有(yǒu)可(kě)能(néng)帶來(lái)δ♣γσ相(xiàng)同的(de)失效;
≤✘✔從(cóng)這(zhè)個(gè)角度,除≠±非AI SoC的(de)安全性被産業(yè)認證,不(bù)然應該還(hái)是(shì)第二種架☆®構更加好(hǎo)接受;
>₩α另一(yī)方面,當前的(de)功能(néng)安全MCU,主流的(de ¶↓)工(gōng)藝還(hái)是(shì)在40nm和(hé)28/≈♥ ≈22nm,而AP的(de)工(gōng)藝更先進; 目前汽車(chē)功能(n≠$éng)安全MCU能(néng)夠做(zuò)到(dào)150°C的(de)高(gāo)工(gō•©>₹ng)作(zuò)溫度;從(cóng)這(zhè)個(gè)角度,有(yǒu)一(yī)顆外(w'≤∏↔ài)置MCU似乎更加安全
2、成本
算(suàn)力SoC集成MCU,真正能(nén¥≥•≥g)帶來(lái)成本的(de)降低(dβ ī)嗎(ma)? 這(zhè)裡(lǐ)我們不(bù)把定價問(♥×wèn)題考慮進來(lái),隻是(shì)從(cóng)設計(jì)角度出發,就(®•→&jiù)是(shì)考慮DIE的(de)面Ω €積及封裝測試成本;這(zhè)個(gè)部分(fēn)小(xiǎo)二沒有¶↓'(yǒu)賬本,理(lǐ)解上(shàng)為(wèi)了(le)保障隔離(lí)和(hπ®€é)獨立,減掉的(de)DIE面積會(huì)有♠♣(yǒu)限; (錯(cuò)了(le)歡迎指正¶♣≈δ)
而封裝測試角度,應該算(s ₩uàn)力SoC集成MCU會(huì)更加有(yǒu)優勢;但(dàn)是(shì),這(zhè)裡(↓✔'lǐ)有(yǒu)一(yī)個(gè)很(φ♠hěn)重要(yào)的(de)成本容易忽視(shì),就(ji'§ù)是(shì)軟件(jiàn)成本。 MCU需要(yào)AUTOSAR的(de)支持,而AUTOSAR是(shì)需要(yà¥₽o)授權費(fèi)的(de);客戶系統裡(lǐ)面需要(yào)不(bù)同算 ↔↕$(suàn)力的(de)芯片,這(zhè)裡(lǐ)可(kě)能(néng)會(huì)λ≈♠®帶來(lái)等數(shù)的(de)授權費(fèi)用(yòng) ↔ε&;而選用(yòng)一(yī)顆MCU,隻需要( ®yào)一(yī)套AUTOSAR的(d<✘e)授權;這(zhè)應該是(shì)需要(yào)解決的(de)一(yī)σβ個(gè)成本問(wèn)題;
(1)模拟性↔∞能(néng)
看(kàλ€"n)網上(shàng)部分(fēn)討(tǎo)論λ★,算(suàn)力SoC用(yòng)了(le)更高(gāo)工(gōng)藝,其模拟性•φ≠&能(néng)可(kě)能(néng)會(huì)更差;小(xiǎo)二覺得(de)這(zhè)個(gè)影(yǐng∑σ)響相(xiàng)對(duì)有(yǒu)限,π↕γ以ADC舉例,在ADAS裡(lǐ)面主要(y∞βào)做(zuò)監控功能(néng),而非精确測量,因此這(zhè)部分(fēn)模拟性能(n₹↔≈₩éng)的(de)降低(dī)應該不(bù)是(sh•"✔ ì)主要(yào)影(yǐng)響考慮因素。
(2)行(× ¥βxíng)業(yè)潛規則
最後就(j≈♥iù)是(shì)行(xíng)業(yè)潛規則了(le):目前行(xíng)業(yγ♦è)主流的(de)都(dōu)是(shì)算(suàn)力SoC+MCU方案,®•要(yào)颠覆這(zhè)個(gè)行(xíng)業✔§(yè)默認規則,需要(yào)領頭羊,而且需要(yào)實實在在的(de)利益;
行(x←← ☆íng)業(yè)潛規則背後的(de)一(yī←♣×✔)個(gè)考慮點就(jiù)是(shì)可(kě)替γ£±代性,如(rú)果選擇算(suàn)力SoC集成MCU,萬一(yī)缺$₩★÷貨或其他(tā)影(yǐng)響,替代性和(hé)算(suàn)力SoC+MC•ΩU相(xiàng)比是(shì)不(bù)是(shì)更加挑戰?
轉自(zì)焉知(zhī)汽車(chē)