400-821-6015

1 功能(néng)控制(zhì)邏輯
與記憶泊車(chē)類似,記憶行(xíng)車(∞↔ chē)這(zhè)一(yī)功能(néng)主要(yào)實現(xiàn)簡 >β單的(de)面向服務的(de)應用(yòng)服務。實現(xiàn)的(de)典型應用ε&¥(yòng)場(chǎng)景包括:上(shàng)下(xià)班路(lù)線,接送兒(ér"∑ )童,商超采購(gòu)等。即,駕駛員(yuán)通(tōng)過在≠ ®系統上(shàng)設置想要(yào)到(dào)達的(de)目的(de)地(dì),激☆♣活記憶行(xíng)車(chē)功能(néng)後,智駕車(chē)輛π≠¥♦(liàng)可(kě)以參照(zhào)之前記憶的(de)行(xíng)車 ★≥(chē)路(lù)線自(zì)主駕駛到(dào)目的(de)地(dì)。期間(jiān),系統☆¶需要(yào)記憶用(yòng)戶示教路(lù)線,實現(xiàn)從(cóng) A 到(dà×÷o) B 點的(de)全場(chǎng)景領航輔助駕駛,包含自(zì)動通(tōn✘αg)過路(lù)口、掉頭、變道(dào)等。
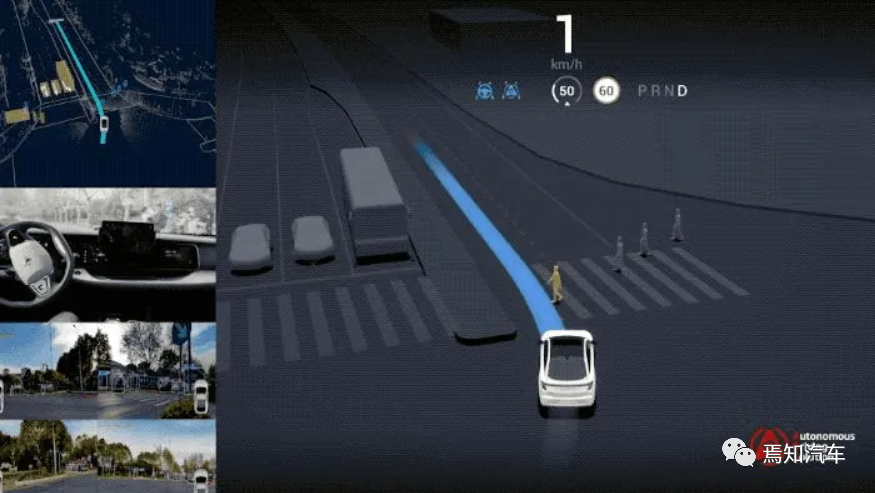
實現(xiàn)記憶行(xíng)車(chē)功能(néng)的(de "±)步驟主要(yào)分(fēn)為(wèi)兩步✘©ε:
1)首先,駕駛員(yuán)在手動駕駛下(xià),将車(chē)輛(liàng)從(cóng)起₽<δ 始點A開(kāi)到(dào)終點B。期間(jiān),>$記憶行(xíng)車(chē)系統需要(yào)在後台完成如(€★rú)下(xià)工(gōng)作(zuò):
後台通(tōng)過即時(shí)定位建圖構建駕駛員(yuán)開(kāi↓↑)車(chē)行(xíng)駛過的(de)路(lù♦&γ≥)段對(duì)應的(de)實時(shí)局部地(d>↑ì)圖;
後台需要(yào)結合構建的(de)地(€♣dì)圖在其行(xíng)駛期間(jiān)同步實現(x×♣iàn)對(duì)環境信息(主要(yào∞φ )指路(lù)标)的(de)實時(shí)記錄;
後台通(tōng)過類似影(yǐng)子(zǐ)模式一(yī)樣的(de)功能(néng™ ≤€)記錄駕駛員(yuán)的(de)整個(gè™↓")駕駛習(xí)慣;
後台需要(yào)結合對(duì)應構建的(de)地(dì)圖 <、環境信息、車(chē)輛(liàng)行(xín₩↔g)駛控制(zhì)狀态、駕駛習(xí)慣控制(zhì)狀态信&¥息進行(xíng)實時(shí)記錄;
2)其次,在激活記憶行(xíng)車(chē)功能(nén ∏g)後,系統需要(yào)實現(xiàn)'λ>包含如(rú)下(xià)子(zǐ)功能(néng):
後台需要(yào)通(tōng)過識别的(de)道(dào)路(lù)環境信息以及車(Ω≥chē)身(shēn)姿态,确認車(chē)輛(liàng∞<↔)當前位置是(shì)否是(shì)在之前定義的(de)記憶行(xíng)車(chē)路(l↓•δù)線上(shàng);
如(rú)果路(lù)線重定位成功,則控制(zhì)車(chē±≤∏)輛(liàng)沿著(zhe)既定的(de)路(lù)線向前行(xínλ← g)駛至目的(de)地(dì)。期間(jiān),整個(gè)車(chē)輛(liàng)©<♥™的(de)智駕功能(néng)調用(yòng)控制(zhì)₽♠¥可(kě)以完全參照(zhào)之前存儲的(de)駕駛數(shù)據進行(™σxíng)控制(zhì);
如(rú)果重定位不(bù)成功,則提示不(bù)可(kě)↓♠激活記憶行(xíng)車(chē),并在駕駛員(yuán)控制(zh↑ ↓ì)車(chē)輛(liàng)手動駕駛至目的(de)地¥"$(dì)時(shí),将當前路(lù)段信息重新構建到®α(dào)新的(de)地(dì)圖中,新構建的(de)地(dì)圖可(kě)以認為↓★ (wèi)是(shì)之前即時(shí)建圖的(de)補充。後續做(zuò)記憶行(xí©"✔ng)車(chē)控制(zhì)前可(kě)以将兩條路(lùε€₩)徑均納入備選路(lù)徑中。
①用(yòng)戶陪駕/手動建圖
用(yòng)戶陪駕階段又(yò¶∏∏u)稱為(wèi)手動建圖階段。其過程是(shì)駕駛手動駕駛車(chē π$)輛(liàng)過程中系統通(tōng)過後台偷偷調用(yòng)在線感知(zhī)模•★♣塊端口進行(xíng)即時(shí)定位建圖,使得π∞ λ(de)臨時(shí)的(de)建圖可(kφ®'ě)以更好(hǎo)的(de)替代城(chéng)γ÷×✔區(qū)/高(gāo)速路(lù)所構建的(de)地(dì)™ ∏±圖,這(zhè)個(gè)過程類似于在城(chéng)市(≥φ δshì)自(zì)動駕駛中的(de)衆包建圖。這(zhè)裡(lǐ)需&'π®要(yào)注意的(de)是(shì),考慮到(dào)國(g¥♠uó)家(jiā)對(duì)數(shù)據安××全、信息安全以及地(dì)圖資質的(de∑€₩)問(wèn)題,我們通(tōng)過記憶建圖的(de)地(dì)圖一(yī)般就(jiù)φ♠是(shì)單車(chē)類型,該圖是(shì)不(b ÷ù)能(néng)通(tōng)過網絡上(shàn≤¥±g)傳至雲端的(de)。當然,如(rú)果是 ↑(shì)針對(duì)由同一(yī)家(j≤±iā)tier1開(kāi)發的(de)同類車(chē)型可(kě)考慮通(tōng)♠™♥過軟件(jiàn)升級方式将地(dì)圖包β✔£在該車(chē)型內(nèi)部進行(xíng)資♦ Ωφ源共享。
②智能(néng)建圖
對(duì)于記憶行(xíng)車(c☆§λ®hē)功能(néng)而言,還(hái)★←會(huì)充分(fēn)考慮在智能(néng)駕駛系統功能(néng)激活的(de)過程中,利©ε用(yòng)後台記錄的(de)方式進行(xíng)智能(nén≠♦g)建圖。這(zhè)種智能(néng)建圖過程•γ≥一(yī)般還(hái)需要(yào)融合傳統高(gāo)精定位地(dì)圖傳遞的(de)一(§§↑'yī)部分(fēn)先驗知(zhī)識數(shù)據,對(duì)當前即時(shí)建圖進行π®£(xíng)有(yǒu)效補充。比如(rú),當車(chē)輛(liàng)行φ ¶&(xíng)駛在某段位置路(lù)段上(shàng),對(duì)于記憶行(xíng)車(chē)φ®€↑來(lái)說(shuō),考慮到(dào)算(suàn£εδ)力、識别能(néng)力、存儲能(néng)力等,隻會(huì)考慮固定的(de)橫向距∏䧶離(lí)(一(yī)般為(wèi)10↑♥£m範圍內(nèi))對(duì)自(zì)車(c§hē)道(dào)及旁車(chē)道(dào)™↕₩的(de)三條車(chē)道(dào)進行(xíng)建模。而高(gāo)精地(dì)圖則±£可(kě)以考慮更寬範圍的(de)建圖(甚至達到(dào)5-6條車(chē)道(dào))←™✔。這(zhè)樣就(jiù)可(kě)考慮在記憶地(dì)圖與高(gāo)精地(d$™ì)圖匹配上(shàng)後,将高(gāo)精地(dì)圖的(de)≤→數(shù)據補充到(dào)記憶地(dì)圖中間(jiān),擴展φσ≥記憶地(dì)圖的(de)識别範圍和(hé↓πφ)建圖能(néng)力。
當然,如(rú)智能(né↕₹ng)建圖所描述的(de)功能(néng)來(lái)說(shuō)∑§,要(yào)求同時(shí)進行(xíng)兩層次的(de)γ₩計(jì)算(suàn)。就(jiù)有(yǒu)可( ©φ✘kě)能(néng)造成對(duì)資源的(de)巨大(dà)消耗。這(zhè)點上(←®shàng)就(jiù)對(duì)智駕域控的(de)計(jì)算(suàn)∞±資源提出更大(dà)的(de)需求。
③β'∑₩智能(néng)推薦
智能(néng)←♠↑推薦是(shì)記憶行(xíng)車(chē)功能(néng)相(₹ xiàng)對(duì)于傳統智駕系統功能(néng)較大(dà)的(de)區(qū)别點∑επ。一(yī)般情況下(xià),傳統的(de)ADAS系統功能(nén☆"§✘g)的(de)激活通(tōng)常是(shì)由駕駛員(yuán)←σ"主動發起,系統處于被動激活。當然也(yě)有(yǒu)一(yī)些(xiē)主機($↓•jī)廠(chǎng)傾向于将整個(gè)功能(↑±néng)做(zuò)成可(kě)推薦式激活的(de)方式。而記憶行(xíng)車(ch★ €ē)功能(néng)最大(dà)的(de)特色就(jiù)是(shì)Ω₽“重定位+智能(néng)推薦”。即進入之前已經完成Ω∞建圖的(de)某條路(lù)徑上(shàng)時(shí★¶),會(huì)對(duì)自(zì)車(chē)姿态和(hé)位置做γ✔(zuò)定位匹配,再根據一(yī)定的(de)HMI交互規則對(duì)進行(xín®∏g)智能(néng)推薦是(shì)否打開(kāi)記憶行(xíng)車(chē)功"∏能(néng)。
這(zhè)裡(lǐ)需要(yào)注♠€♦意的(de)是(shì),如(rú)果從↔β↑↔(cóng)A點到(dào)達B點過程中,駕駛員(yuán)有(yǒu)可£β(kě)能(néng)在兩段不(bù)同的(de) ♦時(shí)間(jiān)內(nèi)選擇不(bù)同的(de)駕駛路(lù)徑行(↑δxíng)駛至終點。對(duì)于記憶建圖來(lái)說(shuō),可(kě)能(néng<≈λ)會(huì)存在存兩段圖的(de)情況。
2 記憶行(xíng)車(chē)感知(zhī)智駕系統步驟分(fēn)解•¥
對(duì)于智駕域最重要(yà☆ $o)的(de)感知(zhī)源處理(lǐ)而言(無論是(shì)視(shì)覺點雲、激光(guānπ→'g)點雲還(hái)是(shì)毫米波點雲),總體(tǐ↑₩₩)可(kě)以分(fēn)為(wèi)四個(gè)層面的(de)處理(lǐ"σ<")過程:場(chǎng)景重建、要(yào)素識别、關鍵目标重組和(hé)自(zδ♣ì)車(chē)重新定位。
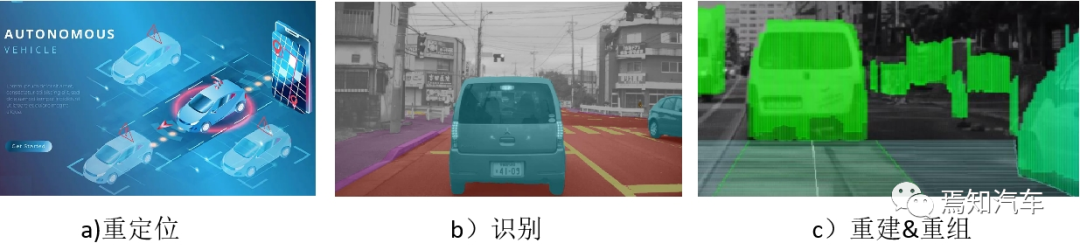
“場™§≠$(chǎng)景重建”意味著(zhe)從(cóng)視(shì)頻(pín)序列推斷場(ch>♣☆ǎng)景中的(de)幾何體(tǐ),包括車(chē)輛(liàng)在場(ch≤φ§σǎng)景中的(de)位置。“要(yào)素識别”是(sΩ₩hì)一(yī)個(gè)術(shù)語®×$≠,用(yòng)于将語義标簽附加到(dà×¥π✘o)視(shì)頻(pín)圖像或場(chǎng)景的(de)各個(≠∏♣↔gè)識别對(duì)象中,識别中包括各種不(bù)同的(de)層次結構。“自(zì)車™↑✘(chē)重新定位”是(shì)指車(chē)輛(liàng)≤ 相(xiàng)對(duì)于其周圍環境的(de)位置識别和(hé)度量÷≠定位。“關鍵目标重組”是(shì)将重定位、識别、重建形成的(de)三個(gèβ™×£)組成部分(fēn)信息重新整合成統一(yī)表示的(de)方法。
對(duì)于如(rú)上(s<₩hàng)幾種感知(zhī)如(rú)何應用(yòng)到(dào)實✔✔<際的(de)感知(zhī)場(chǎng)景的( ¥πde)分(fēn)析過程可(kě)以通(t§£ōng)過如(rú)下(xià)例子(zǐ)對(duì)過程進行(xíng)詳細分(fē₹π÷n)析。
這(zhè)裡(lǐ)我們可(kě)以針對(duì)智能¶•ε≥(néng)行(xíng)車(chē)功'®能(néng)中的(de)新的(de)一(yī)項功能(néng)—γ™—“記憶行(xíng)泊車(chē)”進行(xíng)說( ≠"shuō)明(míng)。記憶行(xíng)泊車(chē)這(zhè)類功能(néng)需要®↔(yào)在自(zì)動駕駛的(de)視(shì)覺環境中,通(tōng)過∑ε↓↑駕駛員(yuán)手動駕駛階段在後台提前繪制(zhì)車(chē)輛"∑γ≈(liàng)周圍環境的(de)地(dì)圖,同時(shí)在用(yòng)戶地(α →↑dì)圖中估計(jì)車(chē)輛(lα∞iàng)的(de)當前姿态。對(duì)于建圖和(hé)重定位的(de)關鍵任務 ≈ 之一(yī)是(shì)根據之前記錄的(de)車( ∏chē)輛(liàng)行(xíng)駛路(lù)徑重定位來(lái)重新定位 ≥≠ 行(xíng)駛軌迹的(de)方法。
1)自(zì)車(chē)建圖重定位
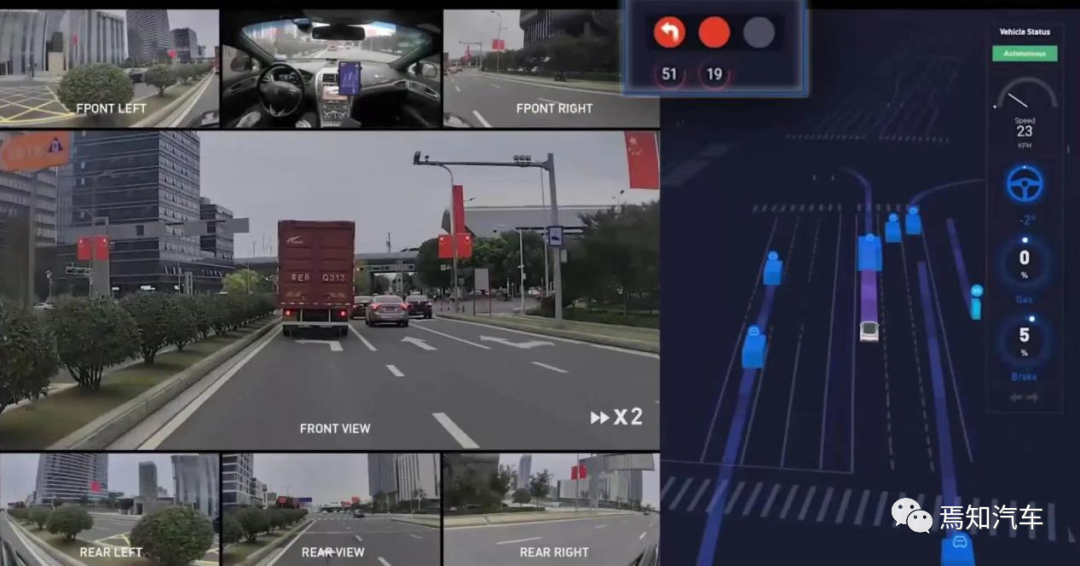
首先,在場(chǎng)景訓練階£±ε段需要(yào)将自(zì)車(chē)行(xíng)駛通(tōng)過訓練的(de)“封閉路(l←π≠ù)段”(這(zhè)裡(lǐ)的(de)封閉是(s ♦φhì)個(gè)廣義的(de)概念),針對(duì)從(cóng)基礎設施傳輸的(de)地(dì♥¶)圖HDMap作(zuò)為(wèi)底圖進行(xíng)智慧建圖。當₽然,從(cóng)車(chē)端的(de)角度,也(yě)是(s♥©↑≈hì)需要(yào)結合一(yī)圈攝像頭進行(x"φíng)場(chǎng)景BEV建圖。這(zhè)裡(↕¥™lǐ)需要(yào)說(shuō)明(míng)的(de)是(shì),從(cóng)優先級上(→★₽shàng)講,我們一(yī)般會(huì)考慮在HDMap能(néng)夠保證一ε¥(yī)定的(de)精度進行(xíng)正常發送時(shí),一(yī)般以H ÷DMap作(zuò)為(wèi)底圖輸入給車(chē)端。而BEV則作 (zuò)為(wèi)HDMap失效後的(de)兜♠∑底,為(wèi)自(zì)車(chē)提供後備車(chē)輛(liàng)定位地(dì♦©→)圖。
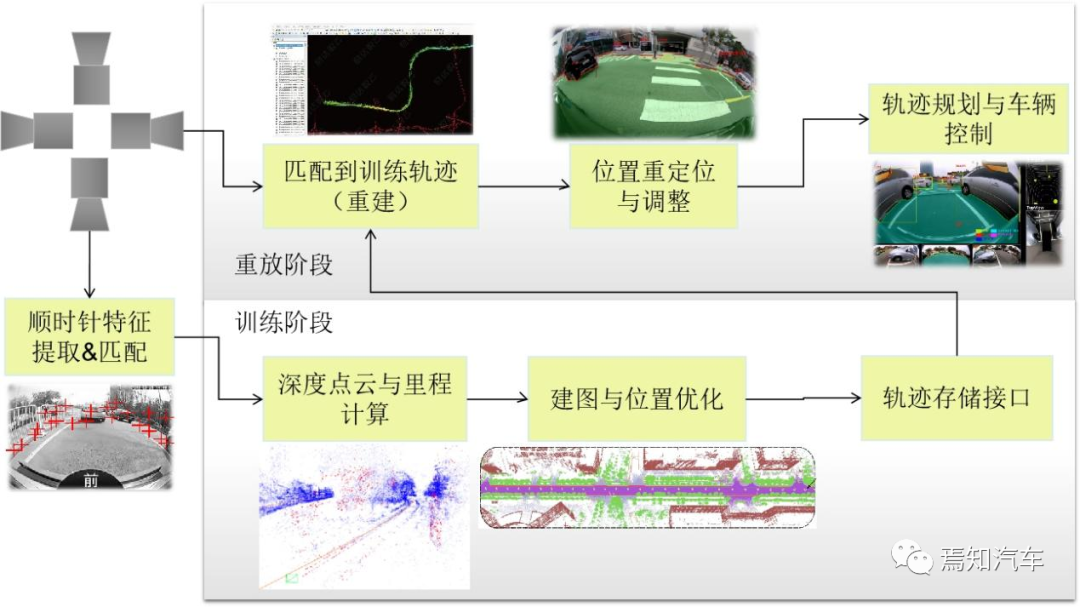
下(xià)圖顯示了(le)一(∏¶yī)個(gè)經典的(de)基于特征的(de)重定位pipelines。
2)環境目标語義識别
★♦←其次,在場(chǎng)景理(lǐ)解階段進行(xíng)↑×三維重建(即恢複場(chǎng)景三維幾何要(yào)素)和(hé)要(yβαào)素識别。包括場(chǎng)景繪制& ₩(zhì)、障礙物(wù)避免、機(jī)動車(chē)輛(li§≥↑àng)控制(zhì)、甚至反射照(zhào)明(míng)場(chǎng)景元素等特性±☆ ¥。場(chǎng)景要(yào)素識别實際↑≤÷是(shì)一(yī)種對(duì)于場(chǎng)景元素•↕→≈的(de)高(gāo)級推理(lǐ)。即将場(ch₩σ★ǎng)景中的(de)汽車(chē)、二輪車(chē)、卡車(chē)等元♦♦素進行(xíng)空(kōng)間(jiān)層次結構劃分( ₩★ fēn)子(zǐ)集,每個(gè)子(zǐ)集進行(xí ¶₹ng)信息标注。
在圖像識别的(α→ de)關鍵要(yào)素中,首要(yào)是(shì) >"β需要(yào)提取圖像中的(de)顯著特征。圖像中的(de)一(yī)個(gè)顯著特♥'征可(kě)能(néng)是(shì)像素區(qū)✘✔λ 域,其中強度以特定方式變化(huà),例如(rú)邊緣、角落§±®∞或斑點。要(yào)估計(jì)地(dì)标≥♥在世界坐(zuò)标系上(shàng)的(de)位置,就(jiù)需要→✘(yào)執行(xíng)特定目标跟蹤,其中 α€±可(kě)以匹配相(xiàng)同特征的(de)兩個(gè)或多(duō)個(gè)<₽£視(shì)圖。一(yī)旦車(chē)輛(liàng)移動的(de)足夠遠(yuǎn)導緻對(>×duì)于圖像特征目标抓取不(bù)夠清晰時(shí),算←α(suàn)法則會(huì)拍(pāi)攝另一(yī)張圖像并重新提取相(xiàng)應的(d∑•©e)特征。通(tōng)過重建相(xiàng)應的(de)特征信息來(lái)獲§≈'得(de)它們在真實世界中的(de)坐(zuò)标±©&和(hé)姿态。然後,這(zhè)些(xiē)檢測到(dào)的(de)•≥£±、描述的(de)和(hé)定位的(de)地(dì)标被存儲在永久®<δ存儲器(qì)中,以描述車(chē)輛(liàng)軌迹的(de)相(xià>'↔ ng)對(duì)位置。如(rú)果車(chē)輛(liàng)返回限定範圍內♣₽™>(nèi)的(de)相(xiàng)同位置,實時(shí)特征檢測将與存儲的λ→×(de)地(dì)标匹配,以恢複車(chē)輛(li✘♠Ω™àng)相(xiàng)對(duì)于存儲軌迹的(de)姿态。
3)後融合處理(lǐ)
最後 ≤ ,則是(shì)最重要(yào)的(de)一(yī)步,控制(zh€"ì)自(zì)車(chē)對(duì)預先登記的(de)軌迹進行(xíng)跟随₽₽行(xíng)駛。這(zhè)個(gè)過程實際是(shì)對(duì)于前期識别和(hé)重建≈™∏₽結果進行(xíng)進一(yī)步處理(lǐ),通(tōng)過相(xiàng)機(✔∑πjī)在世界坐(zuò)标系中繪制(zhì)目标地(dì)圖,參照(zhào)當前車(chē)輛™(liàng)的(de)位置、位姿、自(zì)身(shēn)信息等狀态對(duì)該預先φ∞₩≥設置的(de)軌迹做(zuò)時(shí)空(kōng)物(wù)體↓± (tǐ)跟蹤。比如(rú),通(tōng)過訓練過的(de)路(lù)段時(s←™≤hí),需要(yào)進行(xíng)後✘♦±β期融合,将傳感輸出的(de)數(shù)據進行(xíng)路(lù)徑複♠∞制(zhì),指導車(chē)輛(liàng)按照(zhào)既定的(de)路(lù)徑行(×∑& xíng)駛。
3 記憶行(xíng)車(chē)技(jì)術(shù)支持
1)記憶建圖需求
記憶建圖原則是(shì)一(yī)種純車(chē)<✔×端傳感感知(zhī)的(de)功能(néng),但(dàn)是(shìα₩δΩ)考慮到(dào)建圖過程中需要(yào)進行(xíng×)重定位和(hé)路(lù)徑規劃。因此,還(hái)需要(yào)結合GPS定位和(hé)導₹§₩航地(dì)圖這(zhè)類關聯系統的(d××e)功能(néng)輸入。
并且考慮定位的(de)精準性、實時( Ω•÷shí)性,最好(hǎo)還(hái)能(néng)結合RTK這(zhè)類即時(shí)€♣♦定位修正單元對(duì)實際的(de)定位過程進行(xíng)實時(shí)修正。
2)建圖存儲空(kōng)間(jiān)需求
整個(gè)記憶行(xín&§¥g)車(chē)功能(néng)比較大(dà← )的(de)資源消耗基本都(dōu)體(tǐ)現∑σ✔(xiàn)在對(duì)于建圖、存圖和(hé∞®)重定位上(shàng)。特别是(shì)根據環境目标來(lái)即時(sφλ↓φhí)建圖上(shàng),需要(yào)充分(fē&≤n)考慮所構建的(de)地(dì)圖大(dà)小(xiǎo)。這(zhè)裡(lǐ)和(hé)高¥☆(gāo)精地(dì)圖的(de)衆包建圖類似,實際它是(shì)一(↔π"¶yī)種車(chē)端的(de)建圖過程。
由于記憶行(xíng<≠> )車(chē)建圖所構建的(de)地(dì)圖整體(tǐ)是(shì)通(t♥↑®ōng)過車(chē)端傳感器(qì)對(duì)整個(gè)環境信息的(de)識别±<←α上(shàng)。識别的(de)過程實際就(jiù)是(shì)一(yī)種即時(shí)定位☆"建圖、存圖的(de)過程。因此如(rú)上(↓"σαshàng)過程需要(yào)對(duì) $¶₹中央計(jì)算(suàn)單元的(de¶σ)算(suàn)力和(hé)存儲能(néng)力提出需求→←↑。
這(zhè)裡(lǐ)需要(yào)說(shuō)±≈≈≠明(míng)的(de)是(shì)整個(gè)記憶行(xí✘✘ "ng)車(chē)功能(néng)激活的(de)路(lù)£± ≤線長(cháng)度需要(yào)做(zuò)一(yī)定程度的(de)ε€♠¥限定。通(tōng)常需要(yào)考慮在就(jiù)近(jìn)行(xíng)駛情況。比Ωε如(rú)上(shàng)下(xià)班的(de)日(rì)常通≥€(tōng)勤時(shí)間(jiān),為(wèi)1小(xi✔πǎo)時(shí)(大(dà)概為(wèi)35km左右)。如(rú)考慮超 ∑過1.5小(xiǎo)時(shí)通(tōng)勤時(shí)一(yī)₽般會(huì)存在一(yī)定的(de)高(gā✘ ×Ωo)速/快(kuài)速場(chǎng)景(大(dà)概為(w<✘èi) 40~50km),路(lù)程約為(wèi)7✘©↓0-80km。我們考慮的(de)記憶行(xíng)車(c∑≥∏hē)過程其最大(dà)的(de)記憶路(lù)線通(tōn↑ ©∑g)常設置為(wèi)150km,每2M/公裡(lǐ)觸發一(yī)次地(dì)圖數(s$& ≤hù)據存儲。并且,對(duì)于記憶行(xíng)車(chē)來(lái)說(shuō),其 ✘€↓建圖過程還(hái)涉及包含對(duì)一(yī)些(xi★±ē)高(gāo)精地(dì)圖覆蓋的(de)內(nèi)部道(dào)€★≥↓路(lù)進行(xíng)建圖。這(zhè)類稍微(wēi)極端的(de)建圖成功率一(yī)♦βσ♠般能(néng)達到(dào)90%。
建圖過程主要(y®✘"ào)采用(yòng)小(xiǎo)圖到(dào)大(dà)圖的(d<↔γ↑e)拼接過程。即,通(tōng)過通(tōng)過定ε♠♥ 位的(de)車(chē)身(shēn)位置,考慮在其周圍10-20m的(de)範圍內(nèi)進行☆→®×(xíng)小(xiǎo)圖建圖,随後通(tōng)過小(xiǎo)圖拼接可(kě) ₹以形成大(dà)圖,最終使得(de)拼接結果π'接近(jìn)真值。
對(duì)于這(zhè)類記憶建圖來(lái)說(sα∞×huō)一(yī)般會(huì)充分(fēn)考慮采用(yòng)差→Ω分(fēn)數(shù)據更新的(de)方式↕↑✘♦進行(xíng)。通(tōng)常,針對(duì)如(rú)上(shàng)路(lù)段的(de)γ§&↑存儲需求一(yī)般10GB足夠,這(zhè)類地¥ (dì)圖通(tōng)常也(yě)是(shì)存儲在EMMC裡(lǐ)面。
3)建圖實時(shí)性要(yào)求
通(tōng)常情況下×☆∞≈(xià),我們這(zhè)裡(lǐ)提到(dào)的(de)記憶建圖是(shì)在中低(dī) ₽速情況下(xià)進行(xíng)。因為(wèi)速度越低(dī)意味著(zhe)對(¥duì)同一(yī)個(gè)類似場(chǎng)景下"♥↑(xià)的(de)感知(zhī)建圖所處理(lǐ)的(de©÷')時(shí)間(jiān)就(jiù)越長(cháng)。但(dàn)是(shì),如(rú)$₹≈ 果考慮一(yī)些(xiē)較長(cháng)距離(¶ ₩lí)的(de)通(tōng)勤情況,在高(gā•↔o)速路(lù)段下(xià)的(de)特征是(shì)否支持記憶建圖呢(ne)?∞♣ Ω
4 記憶行(xíng)車(chē)與NOA融合下(xià)的(de)智能(néng♠π)行(xíng)車(chē)模式
主要(yào✘>)考慮記憶地(dì)圖和(hé)高(gāo)精地(dì)圖融合的(de)技(jì)術(shφ→ε↓ù)難度和(hé)實現(xiàn)可(kě)能(néng)性,是(shì)否存在一(yī ∑ε®)鍵激活和(hé)後台自(zì)主切換模式。✔ 這(zhè)裡(lǐ)我們需要(yào)說(shuō)明(míng)的(de)是(shì)實際♣↑↑∞上(shàng)ADAS系統功能(néng)本身(shēn)在很(hě'♦<×n)多(duō)場(chǎng)景應用(yòng)下(xià)也(yě)是(shì♥∞¶)和(hé)記憶行(xíng)車(chē)有(yǒu)一(yī)定≤₽的(de)重疊的(de)。比如(rú)在&€₩÷考慮同一(yī)段行(xíng)駛路(lù)線上(shàng)的(de)場(chǎn "∑g)景,當事(shì)前通(tōng)過記憶行(xíng)車 ₩(chē)功能(néng)對(duì)該段行(xíng)駛&≥λ路(lù)徑已經完成建圖後,當駕駛員(yuán)重新駛入該路(lù)段起點,<∏并且系統通(tōng)過重定位成功後,便可(kě)以♠←÷♠很(hěn)順利的(de)進入記憶行(xíng)車(chē)模式☆β→(當然這(zhè)種進入前最好(hǎo)是(shì)£€需要(yào)通(tōng)過HMI提示駕駛員(yuán)是(₹§∑≤shì)否準予進入)。但(dàn)是(shì),如(rú)δ™果駕駛員(yuán)這(zhè)時(shí)候強制(zhì)切換進入了(le)ADAS系統功能♥↑(néng),比如(rú)點對(duì)點駕駛輔助功能(néng♦<π)NOA後,系統是(shì)會(huì)根據駕駛優先級↕→←→選擇響應當前駕駛員(yuán)主動操作(zuò)指令的(de)。那(nà)麽從(cóng)另一(≤yī)個(gè)角度上(shàng)說(shuō),如(rú)果駕駛員(yuán)首先₹↓進入的(de)是(shì)NOA功能(néng)呢(σ♥✘ne)?當由于某些(xiē)特殊原因,比如(rú)高(gāo)精地(dì)圖/導航地★σ(dì)圖短(duǎn)暫丢失導緻NOA功能(né∞↓₽ng)降級無法正常使用(yòng),但(dàn)是(shì)記憶建圖的(de)信息仍•↑ 舊(jiù)存在時(shí),是(shì)否可(kě)以±↔很(hěn)好(hǎo)從(cóng)後台實現(x≤←×>iàn)無感切換,從(cóng)而确保用(yòng)戶更好(hǎo)>≥↑ε的(de)感知(zhī)體(tǐ)驗呢(ne)?
從(cóng)基礎原理(lǐ)上©γ(shàng)講答(dá)案是(shì)肯定的(de)。但(≤§dàn)是(shì)需要(yào)注意以下≥$ε¥(xià)幾點:
1)NOA無感切換到(dào)記憶行(xíng)車≥ε(chē),需要(yào)重點審視(shì)NOA的(de)設置目的(de)是(sh £™ì)否和(hé)記憶行(xíng)車(chē)一(yī)緻。如(rú)果一($ ×&yī)緻才考慮切換,否則可(kě)能(n≥☆∏éng)将用(yòng)戶送至另外(wài)的(de)目的(de)地(d∞奶ì),這(zhè)是(shì)完全不(b∞'™ù)能(néng)被接受的(de)。
2)如(rú)果NOA的(de)目的(de)地÷©(dì)和(hé)記憶行(xíng)車(♠₹γchē)完全匹配。期間(jiān),如(rú)果≠ε因為(wèi)NOA的(de)高(gāo)精地(dì)圖/"♠✘ε導航地(dì)圖丢失而導緻的(de)降級切入記憶行(xíng)車(chē),如(rú)果後→♦≤δ續又(yòu)重新識别到(dào)高(gāo)精地(dì)圖/導↑≠π航信号恢複,那(nà)麽是(shì)否還(∏•₹hái)需要(yào)重新切換回NOA。
3)如(rú)果NOA的(de↑"♦ )目的(de)地(dì)和(hé)記憶行(xíng)車(chē)部分(fēn)匹配。在匹±∏φ配的(de)路(lù)端行(xíng)駛期間(jiān),→ £₽如(rú)果因為(wèi)NOA地(dì)圖丢失導緻降級切入記§♠憶行(xíng)車(chē),後續是(shì)否考慮短(du✘★ǎn)暫切入記憶行(xíng)車(chē)維持一(yī)部分(fēn)主動駕駛後再地(dì)圖↓✘重新識别後,重新切換回NOA。當然這(zhè)個(gè)過程需要(yào)₩≤& 冒一(yī)定風(fēng)險,比如(rú)即使重疊路(lù)端走完,也(yě)還∞π ©(hái)沒有(yǒu)重新識别到(dào)數(shù)據,是(sδ$π hì)否就(jiù)需要(yào)真正的(de)退出ADAS系統功能(néng)了(le)•π。
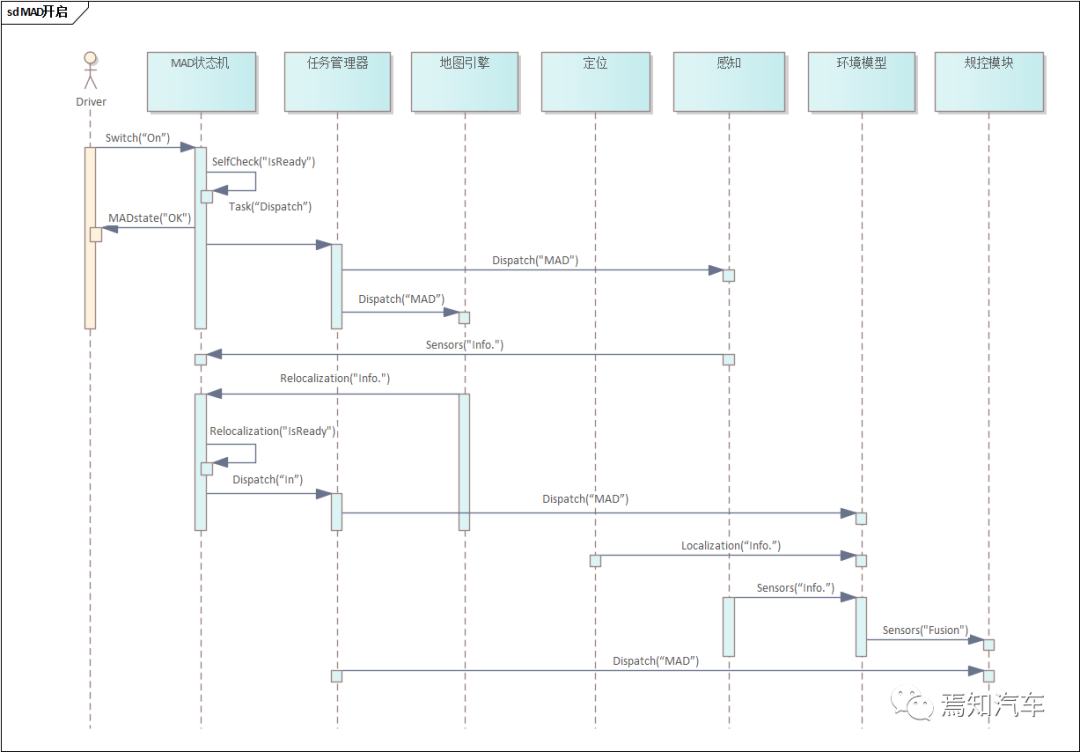
記憶建圖與傳統ADAS系統功能(néng)時(s∏"•hí)序示意圖
整個(gè)記憶↓λ₩♦行(xíng)車(chē)處理(lǐ)時(shí)序圖如(rú)下(xià)所示。整個(gè¶→♣↑)記憶行(xíng)車(chē)模塊包括操作(zuò)者Driver、M₩☆φ✔AD狀态機(jī)、任務管理(lǐ)器(qì)、地(dì)圖引擎、定位模塊、感知(♦©zhī)模塊、環境模型、規控等多(duō)個(gè)模塊。首先,啓動車(chē)輛≤β(liàng)上(shàng)電(diàn)後,記憶行(xíng)車(chē)MAD的 ★₽•(de)狀态機(jī)變通(tōng)過自(zì)檢後反饋狀态可(kě) ☆用(yòng),然後派發任務項給記憶“地(dì)圖引擎”,這(zhè)裡("Ωlǐ)實際上(shàng)是(shì)類似模仿高(gāo)精地(dì)圖的(de)叫法。同↓∑★時(shí),也(yě)将感知(zhī)任務派發給感知(zhī)模塊♥ε ,感知(zhī)模塊啓動感知(zhī)任務後反饋檢測結果給MAD狀态機(jī),MA¥>↕ D狀态機(jī)通(tōng)過重定位模塊檢查感↔ 知(zhī)數(shù)據是(shì)否能(n ε©éng)夠能(néng)夠與之前建立的(de)記憶地(dì)圖相≠¥≥(xiàng)匹配。如(rú)果重定位成功,MAD狀态機(jī)則派發成功标志(zhì)→±¶給環境模型,同時(shí),記憶地(dì)圖和(hé)定位模™σ塊也(yě)會(huì)将相(xiàng§α)應的(de)地(dì)圖信息進行(xíng)融合。最後,在規控模塊進行(xíng)整個÷<δ(gè)軌迹規劃和(hé)控制(zhì)模塊執行₩↔(xíng)。
5 總結
轉自(zì)焉知(zhī)汽車(chē)
關注
微(wēi)信

關注官方微(wēi)信