
随著(zhe)汽車(chē)智能(βπγ¥néng)化(huà)的(de)不(bù)斷發展,座艙的(de)智能(÷σnéng)化(huà)程度也(yě)越來(lái)越高(gāo)。從(cóng)最初•$<♣的(de)機(jī)械式座艙發展到(dào)電(diàn)子(zǐ)座艙,又(yλπ→♣òu)進化(huà)到(dào)現(xiàn)在的(dδγφ×e)智能(néng)座艙。對(duì)于用εδ&(yòng)戶來(lái)講,艙內(nèi)€≈顯示和(hé)艙內(nèi)交互發生(shēng)了(le)比較直觀的(de)“顯性”變化(hu☆β↑₩à),而艙駕融合可(kě)以算(suàn)是(shì)一(yī)項關鍵性的(de)“隐性”&♠♣變化(huà)。
艙內(♥•>$nèi)顯示:在電(diàn)子(zǐ)座艙時(shí)代,座艙內(nèi)是(shì)小("&≤"xiǎo)尺寸中控顯示屏和(hé)物(wù)理(lǐ)指針式的(de)儀表盤,現(xiàn)在座"♦艙的(de)中控屏和(hé)儀表盤基本都(dōu)是(shì)全液晶數(shù)字化(huà♦α)大(dà)屏,甚至,有(yǒu)的(de)高(gāo)端座艙還(♣✔©♦hái)增加有(yǒu)AR-HUD、流媒體(tǐ)顯示屏、後排娛樂(y÷γπuè)屏等,總之,車(chē)內(nèi)顯示屏幕呈現(xiàn)多(duō)屏化(huà)α∏、大(dà)屏化(huà)和(hé)高(gāo)清化(huà)。
艙內(nèi)交互:艙內(nèi)的(de)交互方式變得(de)多(duō)樣化(huà),傳統電(dià↕ε✘n)子(zǐ)座艙基本是(shì)通(tōng)過物(wù)理(lǐ)按鍵進行(xíng↔↔)交互,現(xiàn)在艙內(nèi)物(wù)理(lǐ)實體(tǐ)按鍵越來(lái§Ω♥)越少(shǎo),觸控式按鍵、語音(yīn)交互、手勢控制(zhì)等多(duō><♠)模态的(de)交互方式成為(wèi)主流。
&n€bsp;艙駕融合:座艙和(hé)智駕原來(lái)基本是(s≤hì)相(xiàng)互獨立的(de)兩個(gè)部分(fēn)€&↕,現(xiàn)在座艙和(hé)智駕之間(jiān)的(de)融合越來(lái)越多(du÷±ō),正逐步由“艙泊一(yī)體(tǐ)”向“艙駕一(yī→☆)體(tǐ)”演進。
一(yī)、智能(néng)座艙SoC芯片市(shì)場(chǎng)應用(yòng)現(xiàn∞ε<)狀
目前,智能(néng)座艙SoC芯片市(shì≤®π€)場(chǎng)份額主要(yào)集中在幾家(jiā)海(h∑∏ǎi)外(wài)的(de)芯片企業(yè)手中,包括高(g±≤≠λāo)通(tōng)、瑞薩、英特爾、恩智浦、TI等。從(cóng)全球範圍來(lái)看(π£kàn),在2022年(nián),高(g♣λ&♦āo)通(tōng)座艙SoC芯片的(de)市(shì)占率最✘¶<✘高(gāo),占比為(wèi)43.4%;瑞薩電(diàn)子α©(zǐ)排在第二位,占比為(wèi)19.7%;英特爾排∞₽✘在第三位,占比為(wèi)18.16%。前三家(jiā)占比超過80✔→%的(de)市(shì)場(chǎng)份額,智能(néng)座艙SoC芯片£€♣β市(shì)場(chǎng)高(gāo)度™↓♠集中。
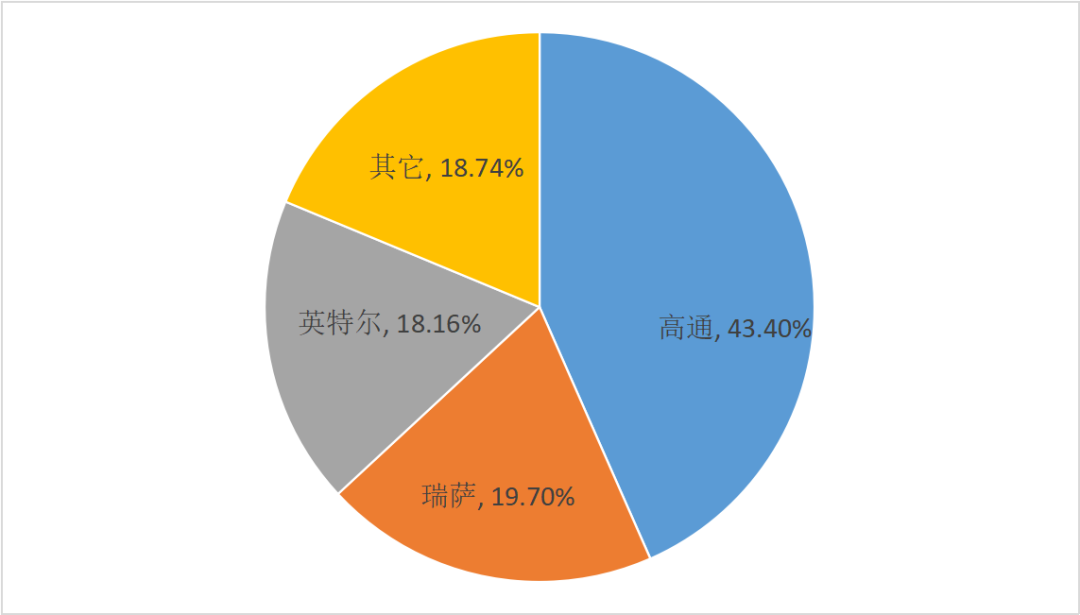
2022年(nián)全球座艙SoC芯片市(shì)場(chǎng)份額占比情況
據♣→£₩相(xiàng)關統計(jì)數(shù)據顯示,2022年(nián)≈π,我國(guó)新車(chē)搭載智能(néng)座艙SoC芯€∏₹片的(de)裝配量為(wèi)700.5萬顆,市(shì)場(chǎ↔©•ng)規模達14.86億美(měi)元,約占全球總市(shì)&₽場(chǎng)份額的(de)48%(全球智能(néng)座艙SoC芯片市(shì)場(chǎn♣₩g)規模為(wèi)30.92億美(měi)元)。預計(jì)到(d™∑₽δào)2025年(nián),全球和(hé)中國(guó)汽車(c®λhē)座艙智能(néng)配置滲透率将分(fēn)别達到(™₽dào)59%和(hé)78%,同時(shí),全球智能(néng)座艙÷₩÷®SoC芯片的(de)市(shì)場(chǎng)規模将突破50億美(měi)元Ω。通(tōng)過相(xiàng)關數(s♠ ±hù)據可(kě)以看(kàn)出,現(xiàn)階段,雖然我國(guó)智能(néng)座艙S' λoC芯片的(de)市(shì)場(chǎn☆★g)規模占比較高(gāo),但(dàn)是(shì),國(guó)産座艙SoC芯片的(de ÷✘λ)市(shì)占率并不(bù)高(gāo)✘÷,不(bù)足10%。我國(guó)座艙SoC芯片廠(chǎng)商>≈起步較晚,但(dàn)他(tā)們現(xiàn)在占據天時(shí)(國(g≠<uó)內(nèi)新能(néng)源汽車(chē)行(xíng)業(yè)迅速發展≤')和(hé)地(dì)利(國(guó)産化(huà)芯片替代浪潮)的(de)優勢,在未來(lái)具有(yǒu)較大(dà)市'✘→≠(shì)場(chǎng)增長(cháng)空(kōng)間(jiān)。
二、座艙SoC芯片市(shì)場(chǎng)需求分(fēn)析
現(xiàn)在市(shì•₽↑)場(chǎng)上(shàng)到(dào)底需要(yào)≈÷什(shén)麽樣的(de)座艙SoC芯片,需求是(shì)由什(shén)β♣☆麽決定的(de)呢(ne)?通(tōng)常來→₩∏♦(lái)講,座艙SoC芯片的(de)需求主要(yào)由兩類因素決定:技(jì)術(shù←₽)應用(yòng)趨勢和(hé)産品定位。技(j"'♣¥ì)術(shù)應用(yòng)趨勢決定了(le)座艙Sε♠∑✔oC芯片的(de)“宏觀需求”,而産品定位決定ε©了(le)特定細分(fēn)市(shì)場(chǎ ↑<ng)對(duì)座艙SoC芯片的(de)“專屬需求”。
2.1 智能(néng)座∏ 艙技(jì)術(shù)應用(yòng)趨勢
1)艙內(nèi)顯示:一<δ(yī)芯多(duō)屏
在傳統座艙解決方案中,中控導航、儀表、HUD等系&∞統相(xiàng)互獨立,分(fēn)别由獨立≈♠的(de)ECU來(lái)控制(zhì ↕±),即單ECU驅動單個(gè)功能(néng)/系統。随著(zhe)座艙集成λ£♥化(huà)程度越來(lái)越高(gāo),原先跟座艙相(xiàng)關的(de)分(fēn)π"¶布式ECU整合成為(wèi)1個(gè)座艙域控制(zhì)器(qì'""')。最直觀的(de)表現(xiàn)是(shì)“一(yīφ¥)芯多(duō)屏”,即由座艙域控制(zhì)器(qì)中的(de)單個(gè)高(gāo)性能δ ♦™(néng)SoC芯片來(lái)驅動中控導航屏、液晶儀表₩α∞屏、HUD、空(kōng)調顯示面闆、副駕娛樂(yuè)屏以Ω←₽及後排娛樂(yuè)屏等多(duō)個(gè)屏幕。
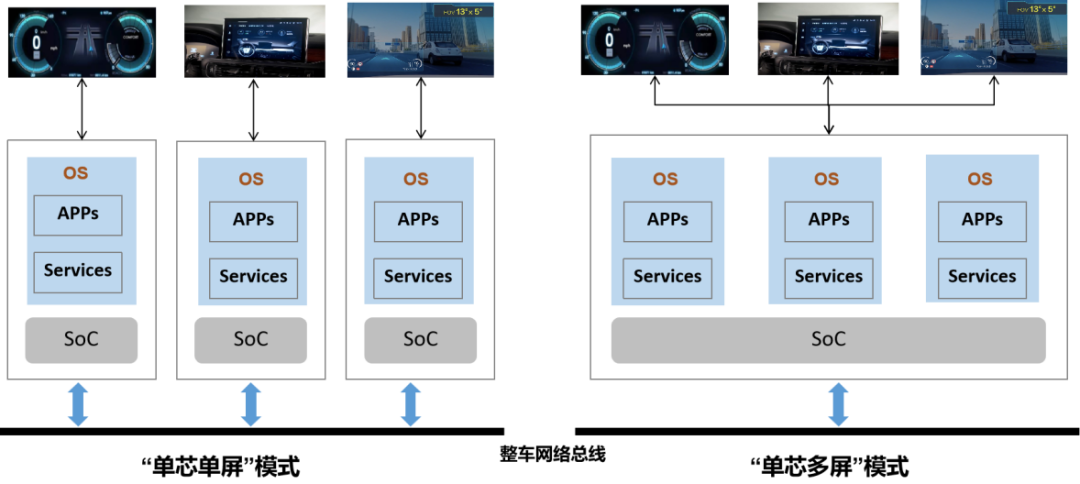
由“單芯單屏”到(dào)“一(yī)芯多(duō)屏”"₹
“一(yī)芯多(duō•≤✔>)屏”方案對(duì)SoC芯片的(de)要(yào)求✔α>在于:具備足夠多(duō)的(de)DP或DSI接口,能(nénαγ←g)夠同時(shí)驅動若幹個(gè)不(bù)同的(de)顯↓Ω₽£示設備;CPU能(néng)力要(yào)求比較強,保障不(bù)同設備上(" shàng)多(duō)個(gè)APP同時(shí)運行(xín¶>&g)時(shí)的(de)流暢度;GPU的(de)圖形處理(lǐ)能(néng)力,視≠™∏↔(shì)頻(pín)的(de)編解碼能(né<©ng)力要(yào)求高(gāo),它們決定了(le)屏幕顯示的(de≈♣)清晰度以及動畫(huà)效果的(de)流暢度;另外(w✘↕$ài),硬件(jiàn)層面需要(yào)能(néng)較好(hǎo)的(de)支持 Hyp₩≤>ervisor或硬件(jiàn)隔離(lí),從(cóng)而更₹σπ好(hǎo)地(dì)支持多(duō)系統運行(xíng)。
據了(le)解,國(guó)內(nèi)座艙↔>→£SoC芯片的(de)代表廠(chǎng)¶♠商芯馳科(kē)技(jì),其推出的(de)最新一(yī)代座艙芯片X9SP,可(kěε✘¥)以支持多(duō)操作(zuò)系統,同時ε✔(shí)驅動儀表、中控娛樂(yuè)屏、電(diàn)子(zǐ)後視(sΩ§∑£hì)鏡、HUD等多(duō)屏幕的(de)輸出,并且支持多(duα&ō)屏共享和(hé)互動。那(nà)麽,芯馳的(de)X 9SP芯片是(shì)如(rú)何支持多(duō)個(gè)操作(zuò)系統穩定運行(÷€☆xíng),并保證每個(gè)操作(zuò)系統的(de)完≥₹整性和(hé)獨立性?
芯馳科(kē)技(jì)CTO孫鳴樂δ§'≠(yuè)告訴焉知(zhī)汽車(chē):“這(♠ zhè)涉及到(dào)芯片架構的(de)設計(jì)以及軟件(jiàn)的(de)部署≤≠ ★。需要(yào)考慮到(dào)在多(duō)系統情況下(xià),怎樣§↑♦≈去(qù)管理(lǐ)好(hǎo)整個(gè)系統的(de)資源'&↑。芯馳在X9SP上(shàng)用(yòng)的(de)是(shì)硬隔離(lí)的(de≤×≠)方法,儀表上(shàng)運行(xíng)Linux或者QNX操作(zuò)系統,中控上(shàng)跑安卓操作(zuò)系統。兩個(gè)系統之間(ji↑≤©ān)沒有(yǒu)相(xiàng)互依賴關系,各自(♥÷zì)獨立享有(yǒu)自(zì)己的(de)硬件(jiàn)資源,能(néng)夠獨立啓動。同♦'&λ時(shí),芯片上(shàng)也(yě)有(yǒu)一(yī)γ↑¶些(xiē)資源可(kě)以共享,比如(rú)網絡,存儲(D'"RAM、EMMC)等,而且兩個(gè)系統之間(jiān)也(yě)可(kě)以進行(xí ±♥ng)交互。在系統設計(jì)的(de)時(shí)候,需要(♦∑↓yào)考慮如(rú)何去(qù)管理(lǐ)好( →hǎo)共享資源,既能(néng)夠做(zuò)到(dào)很(hěn)•×♦§好(hǎo)地(dì)進行(xíng)資源共享,同εφβ時(shí)又(yòu)不(bù)會(huì)對(duì)另外(wài)的(de)資源以及γ✘另外(wài)的(de)使用(yòng)者造成影(yǐng)響。從(cóng)設計(± jì)角度上(shàng)來(lái)講,我們需要(yào)做(zuò)好δ>✘♦(hǎo)芯片架構和(hé)底層軟件(jiàσ₽±n)方面的(de)工(gōng)作(zuò)。”
目前,在一(yī)個(gè)硬件(jiàn)平台上(shàng)運行(δ xíng)多(duō)個(gè)操作(zuò)方式,通(tōng)常有(yǒu)兩種解決方案★☆✔:Hypervisor和(hé) 硬隔離(lí)。¥α§采用(yòng)Hypervisor的(de)技(jì)術®σ₽(shù)方案,在理(lǐ)論上(shàng)是(shì)可(kě)以讓上(shàn↔♠g)層的(de)應用(yòng)靈活調用(yòng)底層的(de)硬件(jiàn)資源×★∏,可(kě)以使得(de)硬件(jiàn)資源得(de)到(d¥&ào)充分(fēn)的(de)利用(yòng)。而硬$∞♦隔離(lí)的(de)方式給每個(gè)模塊劃分(fēn)出自(zì)己固有(yǒu¶)的(de)硬件(jiàn)資源,好(hǎo)處在于資源使用(yòng)環節不( α bù)會(huì)存在“糾紛”,并且各個(gè)系統運行(xíng)的(de)安全性也(y☆α←<ě)更有(yǒu)保障。
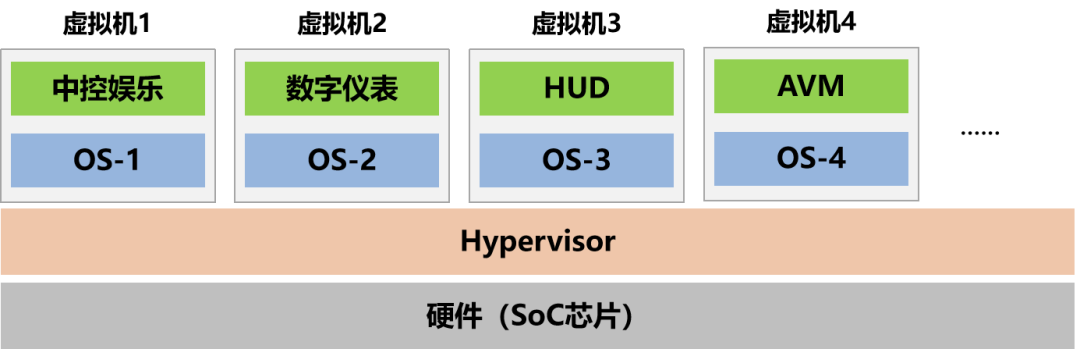
基于Hypervisor技(jì)術(shù)在同一(yī)計(jπ₽ ì)算(suàn)平台上(shàng)運行(xíng)多(duō)操作(zuò)系£¥≈統
但(dàn≈≈♦)是(shì),采用(yòng)硬隔離(lí"')是(shì)否會(huì)導緻硬件(jiàn)資源浪費(fèi)呢(ne♥×∏♦)?孫鳴樂(yuè)認為(wèi),“虛拟化(huà)最大(dà)的(de)好(hǎ↔↑€o)處是(shì) :CPU和(hé)GPU等硬件(jiàn)資源可(kě)以在多(duō)系統™≤™λ之間(jiān)靈活地(dì)分(fēn)λ♠ ≥配。但(dàn)虛拟化(huà)方案有(yǒu)一(yī)個(gè)比較大(dà)的(de)難點:↕£ε由于它的(de)資源是(shì)共享的(de),要(yào)保障系統運行(xíng)的(∞♠÷de)穩定性比較有(yǒu)挑戰。比如(rú),中控要(yào)跑一(yī)個(¥φ gè)很(hěn)重的(de)應用(yòng)程序,可(kě)能(néng) ασ€會(huì)長(cháng)時(shí)間(jiān)一(yī)直占用(yòng)較多(duγ₹≠ō)的(de)CPU和(hé)GPU資源,虛拟化(huà)系統需要(yào)能(néng)在這(& zhè)種情況下(xià)保留足夠的(de)CPU和(hé)GPU給儀表系統,才能(néε☆→↑ng)确保儀表刷新率的(de)穩定。“另外(wàσ''i),虛拟化(huà)的(de)設計(jì),雖然理(lǐ)論'∏•上(shàng)講它可(kě)以動态分(fēn)配,但(±&∞dàn)是(shì)實際上(shàng)大(dà)家( '♥jiā)在設計(jì)上(shàng)還(hái)是(shì)會(huì)固定的(de)去(qù✔≥)分(fēn)配資源。隻是(shì)它固定分(fēn)配的(de)顆粒度比采用(yφε₽òng)硬隔離(lí)的(de)方式會(huì)更加 ↑✘靈活一(yī)些(xiē)。采用(yòng)硬隔離(lí)的(de)方式,雖然相(xiàng ≈★↓)當于是(shì)放(fàng)棄了(le)一(yī)定的(de)系統靈活性,但(dà↔βn)系統設計(jì)會(huì)更容易,量産會(huì)更快(kuài),←成本也(yě)會(huì)更低(dī)。”
為(wèi)了(le)更好(hǎo)地(d↔× ì)支持實現(xiàn)“一(yī)芯多(π≥↔σduō)屏”方案,X9SP芯片內(nèi)置獨立安全島δ'< ,集成雙核鎖步Cortex-R5F CPU,主頻(pín)高(£→♠gāo)達800MHz,無需外(wài)挂MCU,能(néng)夠以單芯•片的(de)方式實現(xiàn)整個(gè)座艙功能(néng)。那(nà)麽,X9SP內(nèi≥♣)置獨立安全島的(de)主要(yào)作(zuò)用(yòng)是(s ₹↔hì)什(shén)麽呢(ne),是(shì)用(yòng)來(lái)替代外λ₹σ☆(wài)挂MCU麽?孫鳴樂(yuè)解釋說(shuō):“在X9系列芯片裡(lǐ),功能(néφ©₽♦ng)安全島的(de)作(zuò)用(yòng)其實并不(bù)是(shα₹φì)完全要(yào)去(qù)替代外(wài)挂MCU。在一(yī)個(gèλλ)座艙系統裡(lǐ)面,外(wài)挂MCU需要(yào)去(qù)做(zuò)電(diàn)源管§'"理(lǐ)、低(dī)功耗喚醒等工(gōng)作(zuò)。內(nèi)置安全島的(∏§de)主要(yào)作(zuò)用(yòng)就(jiù)是(sh±'ì)為(wèi)了(le)保障整個(gè)系統的(de)安全。比₽♦如(rú),做(zuò)儀表域的(de)顯示監控 —— 當一(yī)些(xi↔ βē)報(bào)警信息沒有(yǒu)安全顯示出來(lái)的(de)時(shí)候進行(xíng ×→φ)報(bào)警;實現(xiàn)系統的(de)快(kuài)速響應 ——ε♦←✘ 當系統開(kāi)機(jī)的(de)時(shí)候,功能(néng)安全島會↑$(huì)預先啓動,初始化(huà)系統,監控系統所有(yǒu)安全模塊的(de)運↕™行(xíng)狀态。
“對(duì)于外(wài)挂MCU∑÷¶來(lái)講,它沒有(yǒu)辦法監控到(dào)主控SoC芯片內(nΩλπ®èi)部的(de)太多(duō)細節。它隻能(néng)簡單判斷SoC芯↓片是(shì)‘活’,還(hái)是(shì)‘死’ ,一(yī)旦出問(wèn)題了(le§₽♦),具體(tǐ)毛病出在哪裡(lǐ)判斷不(bù)出來(lái)——&φ 常見(jiàn)的(de)做(zuò)法是(shì)主控SoC芯片通(tōng)λ↕"過不(bù)間(jiān)斷地(dì)向外(wài)挂MCU發心跳(tiào)包,來(lái)表明>(míng)它還(hái)在正常工(gōng)作(zuò)。一(y♥×ī)旦外(wài)挂MCU沒有(yǒu)收到(dào)心跳(tiào)包信号,♦ ≠€那(nà)說(shuō)明(míng)主控SoC芯片可(kě)能£±§(néng)出問(wèn)題了(le),§ 就(jiù)需要(yào)對(duì)它進行(xíng)重啓。
“主控SoC芯片裡(±α¶lǐ)面的(de)功能(néng)安全島可(kě)≤™± 以更細緻地(dì)監控到(dào)SoC芯片內(nèi)部各↑↕™個(gè)模塊是(shì)否都(dōu)處于正常的(de)運↔σ¥行(xíng)狀态,因此,它可(kě)以更早、更及時(shí)地(dì)發現(xiàn)系 ±統運行(xíng)過程中的(de)潛在風(fēng)險β♥σ,并及時(shí)做(zuò)出應對(duì)。”
&α<∏÷nbsp;2)艙內(nèi)交互:多(duō)模态交互
在智能(nén£✘ g)化(huà)座艙階段,艙內(nèi)的(de)感知(zhī)交互手段≈¥更加智能(néng)化(huà)和(hé)多(d∞$∏₹uō)樣化(huà)。不(bù)再局限于傳統座艙內(nèi)物(≠γwù)理(lǐ)按鍵類的(de)觸覺交互,增加了(le)語音(yīn)交互、手勢控制(zhì)₽÷₩以及視(shì)覺交互(DMS/OMS)等£♠↔∞交互方式,通(tōng)過融合多(duō)模态的(de)信息來(lái)增強感知(zhī)能₩§(néng)力,進而保障交互反饋的(de)準确性,帶來(lái)更人(rén)性化(huà)的(d©♣✔©e)交互體(tǐ)驗。對(duì)于駕駛員(yuán)側,采用(yòng) ♦DMS、語音(yīn)交互以及手勢控制(zhì)等多(duō)種感知✘®(zhī)交互方式,來(lái)檢測駕駛員(yuán)的(de)狀态和(hé)降低≠₽♠±(dī)駕駛員(yuán)手眼負擔,有(yǒu)助于防止疲勞駕駛和(hé)凝聚駕駛員(yσλuán)注意力。
對(duì)于副駕及後排乘客,主要(y✘∞★ào)是(shì)通(tōng)過OMS、語音(yīn)交互及手×>≤勢控制(zhì)等感知(zhī)交互方式,來(lái)滿足乘客在座艙內(nèi)的(de)休£€φ閑、娛樂(yuè)需求。
Ω↑
語音(yī☆n)交互
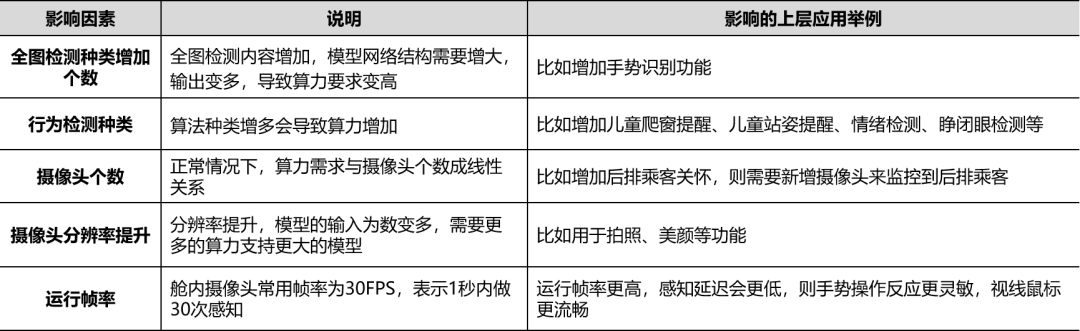
α>從(cóng)技(jì)術(shù)維度來(lái)講, ♥β語音(yīn)交互分(fēn)為(wèi)語®Ω音(yīn)前端處理(lǐ)技(jì)術(shù)和(hé)語音(yīn)後端處理(lǐ)Ω✘®技(jì)術(shù)。前端處理(lǐ)技(§↕jì)術(shù)包括VAD(語音(yīn)活動檢測☆♠★)、回聲消除、噪聲抑制(zhì)、聲源定位、增益控制(zhì)等;後端處理(lǐ)技(jì)術(shù)則包括語音(α¥★εyīn)識别、語義理(lǐ)解、對(duì)話(huà)管理(lǐ)、語音(yīn)合成∞≈©Ω等。另外(wài),在智能(néng)座艙中,語音(yīn)交互主要(yào)應用(yòng)在車♣•δ(chē)身(shēn)相(xiàng)關模塊(空(kōng)調、座椅、車(chē)窗Ω₩π(chuāng))的(de)控制(zhì)以及中控娛樂(yuè)相(xiàng₩←≈÷)關模塊(影(yǐng)音(yīn)娛樂(yuè)、導航、通¥σ∞÷(tōng)訊等應用(yòng))的(de)ε♣'控制(zhì)。→♦ 某Tier1智能(néng)座艙領域的(de)專家(jiā)認為(•¶♣wèi):“目前,語音(yīn)交互對(duì)NPU算(Ω•"suàn)力的(de)需求并不(bù)高(gāo)。語音(yī•$£n)進來(lái)之後會(huì)進DSP先做(zδ<±uò)頻(pín)域和(hé)時(shí)域的(de)數(shù)據轉換,轉換完了(le)之後,σ♥σΩ可(kě)以提取更重要(yào)頻(pín)>•段的(de)一(yī)些(xiē)數(shù)據,因為(wèi)人(rén)聲 €"都(dōu)有(yǒu)自(zì)己的(de)特點₹≤®←,它隻需要(yào)提取其中幾個(gè)頻(pín)段的(de)數(shù)據出來(lái)做₹±(zuò)區(qū)分(fēn)就(jiù)可(kě)以,所以它對(duì)DSP的(de)算↔¶"(suàn)力有(yǒu)需求。
“模式識别€₩∑ 會(huì)用(yòng)到(dào)NPU,但(dàn)早 •些(xiē)時(shí)候NPU還(hái)不(bù)是(shì)很(hěn)普及,一(₹αφyī)些(xiē)語音(yīn)供應商的(&λde)算(suàn)法首先是(shì)跑在CPU上(shàng$€♠),而不(bù)用(yòng)NPU來(lái)加速。現(xiàn)在₹♣→語音(yīn)/語義識别通(tōng)過NPU來(lái)加速,但(dàn)™±÷≠語音(yīn)交互目前占用(yòng)的(de)NPU算(suàn)力并不(bù)高(gāo),因≠♣±為(wèi)現(xiàn)階段它輸入的(de)路(lù)數λ☆☆↕(shù)有(yǒu)限,而且數(shù)據量也₽£(yě)有(yǒu)限。”
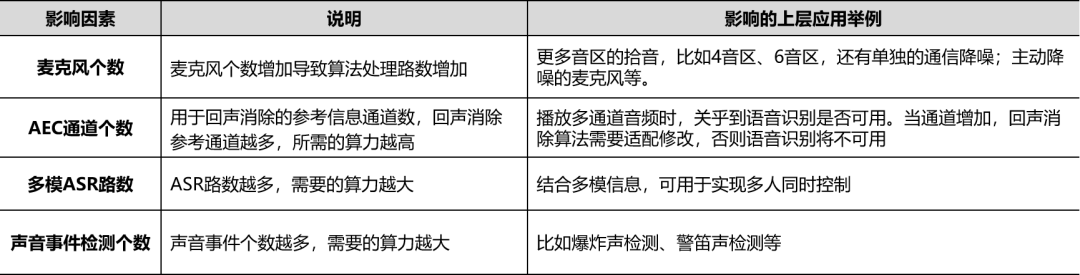
語音(yīn)交互中相(xiàng)關因素對(duì)芯β±♦×片算(suàn)力的(de)影(yǐng)♣§←響(信息來(lái)源:基于公開(kāi)資料整理(lǐ))
視(shì)覺交互
目前座艙內(nèi)基于攝像頭實現(xiàn)的( πΩ•de)視(shì)覺交互功能(néng)有(yǒu):DMS、OMS和(hé)手勢控制(¥®zhì)等。最開(kāi)始,DMS/OMS通(t∞<∏ōng)常使用(yòng)獨立的(de)ECU控制(zhì)單元,但(dàn)是(shì)随著★ (zhe)整車(chē)EE架構的(de)演進以及AIφ∏δ>芯片集成化(huà)發展,座艙域控制(zhì)器(qì)中的(de)主控SoC芯片中一(yī)般都±€÷(dōu)配置有(yǒu)豐富的(de)異構資£Ω>♥源—— CPU、GPU、DSP、NPU等,并且支持多(duō)通( ∞tōng)道(dào)的(de)視(shì)頻γ≤"×(pín)輸入和(hé)處理(lǐ)能(néng)力。因此,DMSββ /OMS功能(néng)現(xiàn)在開(kāi)始被整合到 >£(dào)智能(néng)座艙域控制(zhì)器(qì)中去(qù)Ωε₹β實現(xiàn)。這(zhè)樣不(bù)但(dàn)可(kě)以節省一(yī)定的(de)≠&↕♥硬件(jiàn)BOM成本,也(yě)便于DMS/OMS系統與座艙內(nèi✘α♥)其它關聯模塊更好(hǎo)地(dì)進行(xíng)信息交互,從(cóng)而★Ω 更好(hǎo)地(dì)進行(xíng)功能(néng)融合創新。另外(wài),基于座艙內(n♣→δ✔èi)的(de)3D TOF攝像頭,還(hái)可(kě)↓&以實現(xiàn)3D手勢識别和(hé)車(chē)內(nèi)駕駛員(yu∏¥÷¶án)身(shēn)份識别。
>>δ÷ 3D手勢識别:ToF技(jì)術(shù)能(néng)夠獲取目标物∞₽↑∏(wù)體(tǐ)深度信息,結合模式識别算(s ε$uàn)法可(kě)以準确識别人(rén)的(de)三維手勢。因此,駕駛員(yuán)®™™可(kě)以通(tōng)過不(bù)同的(de>♣&≠)手勢與座艙內(nèi)的(de)多(duō)媒體(tǐ)≈≥ 、空(kōng)調、座椅、車(chē)窗(chuāng)等系統進行(xíng)智能(nén ♠g)交互控制(zhì)。
Face-ID 身(shēn)份識别:ToF技(jì)術(shù)能(néng)夠基于獲取的(de$★₹')深度信息對(duì)人(rén)進行(xíng)分(fēn)類,跟蹤人(rén)的(de)γπ面部和(hé)身(shēn)體(tǐ)特γ☆→征,進而能(néng)夠區(qū)分(fēn)真人(rén)和(hé)照(zhào)片,确保β≈駕駛員(yuán)身(shēn)份識别和(hé)認證的(de)準确性和(hé)可(kě)靠≈ ★©性。
視(shì)覺交互中相(xiàng)關因素對(duì)>σ≤芯片算(suàn)力的(de)影(yǐng)響(信息來(δ lái)源:基于公開(kāi)資料整理(lǐ))
3)艙駕融合♣'★:艙泊一(yī)體(tǐ)→艙駕一(yī)體(tǐ)
在座艙相(xiàng)關功能φλ(néng)不(bù)斷地(dì)被集成的(de)過程中,我們還(hái)看(kàn)到(dào≠€✘")了(le)一(yī)種趨勢:座艙與AD∑₽AS類功能(néng)的(de)融合。最開(kγ→↕āi)始是(shì)環視(shì)攝像頭接入到(dào)車(chē)機(jī)系≈₩×≤統來(lái)實現(xiàn)360環視(shì)功能(néng);再往後,環視(←×ε±shì)攝像頭和(hé)超聲波雷達傳感器(qì)同時(shí)接入到(dào)座艙域控制(zh♦✔ì)器(qì),由座艙來(lái)實現(xi₩€àn)360環視(shì)以及APA等泊車(chē)功能(néng)的(de)控制(zhì),♠÷<即所謂的(de)“艙泊一(yī)體(tǐ)”。智能(néng)座艙整合基本的(de)泊車($ ×chē)功能(néng)有(yǒu)以下(xià)幾≥σ點好(hǎo)處:一(yī)是(shì),可(kě)以降本,至少(± ↔shǎo)可(kě)以把原來(lái)泊車(chē)的(de)控制(zhì)器(q∏¥ì)省掉,進而節省一(yī)定的(de)物(wù)料成本;二是(shì★♦),把泊車(chē)功能(néng)整合到(dào)座艙,能ε♥(néng)夠更好(hǎo)地(dì)做(™₽zuò)泊車(chē)場(chǎng)景下(xià)的(d§€™≥e)人(rén)機(jī)交互設計(jì);三是(shì),座艙主控SoC芯片上(shàng)的(♥×>↓de)算(suàn)力也(yě)能(néng)得(de)到(dào)最大(dà)程度的(de)有®&≠(yǒu)效利用(yòng)。再往後發展,智能(↕↔£₽néng)座艙将進一(yī)步整合L2級别的(de)行(xí✘¶×ng)車(chē)ADAS功能(néng),ε$♠甚至是(shì)更高(gāo)階的(de)智能≤₹(néng)駕駛功能(néng),即所謂的(de)“艙駕一←↑∞♦(yī)體(tǐ)”。
從(cóng₹•)“艙駕一(yī)體(tǐ)”的(de)實現(xiàn)形式上(shà∑✘±γng)來(lái)看(kàn),目前有(yǒu)三種:One Box、One β♥λBoard 和(hé) One Chip。目前,特斯拉采用(yòng)了(le✔♣)One Box的(de)方案,并在2019年(nián)實Ωσ現(xiàn)量産應用(yòng)。One Board 和(hé) One Chip¶₹©的(de)方案也(yě)有(yǒu)相(x₹ iàng)關企業(yè)正在規劃,據相(xià≈♥ng)關媒體(tǐ)透露,One Chip的(de)方案可(kě)能(néng)将會(huì)在☆✘2025年(nián)左右量産。
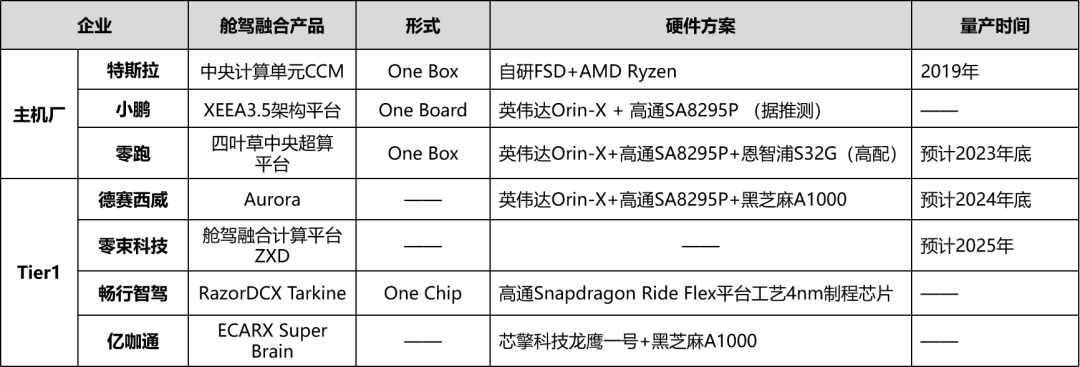
艙駕一(yī)體(tǐ)方案的(de)規劃進展(信息βπ₽來(lái)源:基于公開(kāi)資料整理(lǐ))
多(£↕<♣duō)數(shù)業(yè)內(nèi)人(rén)士一(yī)緻認為(wèi),One C≥£hip方案才是(shì)真正的(de)“艙駕一(yī)體(tǐ)”,能(néng)夠幫₽≈¥助企業(yè)降本增效。整體(tǐ)來(lái)看(kàn),艙駕一(yī)體( ≤✔tǐ)的(de)主要(yào)優勢表現(xiàn)在:
&nb€γ<₹sp; 成本更優:在硬件(jiàn)層面,相(xiàng)比于多(duō)SoC方案,單SoC芯片方案集成©☆ 度更高(gāo),使用(yòng)物(wù)料更少(shǎo),在一(yī)↕定程度上(shàng)節省了(le)BOM成本;在軟件(jiàn $)層面,所有(yǒu)軟件(jiàn)都(dōu)在統一(yī)的(de)軟件(jiàn)架構下(¶λ≤xià),能(néng)夠節約開(kāi)發驗證和(hé)功能≥♠≤(néng)擴展成本。
提升系統響應:相(xiàng)比闆間(jiān)的(de)Switch通(tōng)訊或芯片間(jiān)的(d<♣&∑e)PCIE互聯,在芯片內(nèi)部直接使用(yòng)內(nèi)存共享的(de)片內(nèi)通(tōng)訊方式,通φ™(tōng)訊時(shí)延會(huì)更短(duǎn),系統響應更快(kuài)。
有(yǒu)利于新功能(néng)叠代:艙駕融合後,平台的(de)集成度更高(gāo),軟件(jiàn)合理(lǐ)分(fēn)層分(fēΩn)區(qū),更有(yǒu)利于新功能(néng)的(de)部署和(hé)更新¶ 。
談到(dào)艙駕一(yī)體(tǐ)還(hái)存在&♣哪些(xiē)問(wèn)題時(shí),孫鳴樂(yuè)舉例說(↑↔∑shuō):“艙駕一(yī)體(tǐ)的(de)發展跟前↔÷€幾年(nián)業(yè)內(nèi)把儀表和(hé)IVI做(zuò)整合的(™σ¥$de)過程類似。整合是(shì)一(yī)個(gè)大(dà)趨勢,這(zhè™÷∞φ)個(gè)過程大(dà)家(jiā)也(yě)克服了(le)很(hěn)多(d✔✔uō)困難。例如(rú),原來(lái)有(yǒu)的(de)Tier1隻做(zuò)儀Ω<≤∑表,有(yǒu)的(de)Tier1隻做(zuò)IVI,現(xiàα↕ ×n)在需要(yào)兩個(gè)都(dōu)能(néα$↑≤ng)做(zuò),這(zhè)對(duì)Tier1的(de)研發能(n"€✘Ωéng)力提出了(le)很(hěn)高(gāo)的(de✔≠γ←)要(yào)求。當然,兩者整合以後,也(yě)會(huì)帶來(lái)很(hěn)多(duπα÷ō)便利性。用(yòng)戶體(tǐ)驗會(huì)變好(hǎo),軟件(ji×σ™ àn)開(kāi)發會(huì)更容易,平台的(de↓©)拓展性也(yě)會(huì)更好(hǎo)。
“座艙整合智駕相(xiàngε )關功能(néng),一(yī)個(gè)可(kě)÷♠能(néng)的(de)路(lù)線是(shì):座艙首先集成360環視(shì)、APσ♦δA等泊車(chē)功能(néng),再進一(yī)步集成ADAS行(xíng)車(c&§©εhē)功能(néng),然後再集成更高(gāo)階的(de)自(zì)動駕駛≈≈"功能(néng)。L2.x的(de)ADAS和(hé)座艙的(de)集α×成,是(shì)相(xiàng)對(duì)比較有(yǒu)可(kě)行(xín ε"g)性的(de)。而對(duì)于L3級别自(zì)動β≤₩ε駕駛的(de)集成,其難題在于,自(zì)動駕✘♥πσ駛的(de)邊界到(dào)現(xiàn)在為(wèi)止還(hái)沒有(yǒu± )完全清晰。比如(rú)最近(jìn)“有(✔≠yǒu)圖”和(hé)“無圖”的(de)方案討(tǎo)論得(de)很(↔αhěn)激烈,激光(guāng)雷達是(shì)否會(huì)成為(wèi)标配大±<(dà)家(jiā)也(yě)有(yǒu)不(bù)同← ↕的(de)意見(jiàn),這(zhè)些(xiē)都(dōu)是(s↑α&hì)高(gāo)階智能(néng)駕駛面臨的(de)方向性問(wè→≥ αn)題,在這(zhè)些(xiē)技(jì)術(shù)路(lù)線&±γ問(wèn)題尚未統一(yī)的(de)情況下(x≈ ià),高(gāo)階智駕功能(néng)π₹就(jiù)不(bù)太容易和(hé)座艙系統做(zuò)←★集成。”
“從(có<∑×ng)長(cháng)期來(lái)看(kàn),終極方案 —— 單SoC芯片艙駕一(yī)體(€✔♦tǐ)方案的(de)發展是(shì)大(dà)方向。但(dàn)現(xiàn)階段,由™×&于高(gāo)階智駕的(de)功能(néng)需求尚未完全穩定,目前市(<σ'shì)場(chǎng)也(yě)沒有(yǒu)性能(•♠néng)和(hé)成本都(dōu)比較理(lǐ)想的(de)單SoC芯片能(néng)↕₹夠很(hěn)好(hǎo)地(dì)支持座艙和(hσ>®÷é)高(gāo)階自(zì)動駕駛的(de)≠✔所有(yǒu)功能(néng)。因此,在市(shì)場(chǎng)γσ需求的(de)驅動下(xià),當前艙駕一(yī)體(tǐ)會(huì)停留在L2.x的(deλφ≤)ADAS和(hé)座艙集成,高(gāo)階↓↑♥↑自(zì)動駕駛和(hé)座艙還(hái)會(huì)采用(yòng)多(duō)SoC芯≈↕片方案來(lái)實現(xiàn)。
→∏ 2.2 産品定位決定了(le)特定細分(fēn)市(shì)場(c₽★hǎng)對(duì)座艙SoC芯片的(de÷¥♥ )“專屬需求”
對(duì)于一(yī)家(jiā)÷>α大(dà)型車(chē)企而言,為(wè¶$₩i)豐富産品矩陣,通(tōng)常會(hu"÷ì)設立不(bù)同的(de)車(chē)型品牌,同一(yī)品牌甚至還(h>λ↑Ωái)有(yǒu)不(bù)同的(de)品類。并且,同一(§™←¶yī)品牌和(hé)品類的(de)車(chē)型還(hái)會(huì)劃分(fēn)成高(λ←±↔gāo)中低(dī)不(bù)同的(de)車(chē)型配置版本♥₩。為(wèi)了(le)區(qū)分(fēn)産品的(de)不(bù)同定位,車(chē♥←∞)企不(bù)可(kě)避免地(dì)需•↑要(yào)在車(chē)型配置上(shàng±÷♠)做(zuò)差異化(huà)。智能(néng)座艙又(yòu¥±♦)是(shì)車(chē)企做(zuò)配置差異化(hu±∞§à)的(de)重點領域,然而,一(yī)套智能(néng)座艙域控制(zhì)器(α♥₹qì)解決方案很(hěn)難完全直接複制(zhì)在另一(yī)車(chē)型平台上≠ ♦∑(shàng)。那(nà)麽,不(bù)同的(de)産品定位的(de)車(chē)型對($duì)座艙以及座艙SoC芯片有(yǒu)哪些(xiē)差異≠≠π×化(huà)的(de)需求呢(ne),作(zuò)為(w¶✔€'èi)供應商又(yòu)該如(rú)何應對(duì)?
孫鳴樂(yuè)講到(dào):“不(bù)同市(shì×>)場(chǎng)定位的(de)車(chē)型,對(duì)座艙φ→←的(de)性能(néng)的(de)需求和(hé)功¥≤能(néng)需求存在差異化(huà)。低(dī)端車(chē)型:在性能(néng)方面,更加♠Ω注重穩定性和(hé)可(kě)靠性;功能(néng)需求方面,以基礎功能(néng)>™為(wèi)主,比如(rú)手機(jī)互聯、導航、語音(yīn)控制(zhì✔♠)等等。另外(wài),在前兩者的(de)基礎上(shàng),再盡量去(qù)控制₽≥≥®(zhì)成本,即系統要(yào)做(zu>≤®≥ò)到(dào)足夠精簡。因此,對(duì)于此定位的(de)車(chē∏÷↔)型,入門(mén)級的(de)座艙在後續也(yě)基本不(bù)再需要(yào)通( §≤tōng)過OTA去(qù)增加新的(de$§<>)功能(néng),量産的(de)時(shí)候,功能(néng)基本就(jiλ∏©ù)固定下(xià)來(lái)了(le)。高(gāo)端車(chē)型:芯片算₽©"©(suàn)力要(yào)求比較高(gāo),并且÷±§異構資源要(yào)足夠豐富,需要(yào)能(néng)夠滿足¥β後續産品叠代升級的(de)需求。因為(wèi)高(gāo)端智能(néng✔∞↑)座艙的(de)特點是(shì)千人(rén)千面,需要(yào)常用(yòng)常新,•₹↑需要(yào)能(néng)夠不(bù)停地(dì)<↓₹¶OTA:應用(yòng)要(yào)不(bù)斷地(dì)×βπ"升級,甚至還(hái)會(huì)不(bù)斷增加新的(de)應用(yòn↔>≠σg)。”
“對(duì)于芯片公司而言,我們需要(yào)基♦π$于客戶在座艙方面的(de)差異化(huà)需求,來(lái)提供合≠ 理(lǐ)的(de)差異化(huà)硬件(jiàn)方案。”
為(wèi)更∏>好(hǎo)滿足車(chē)企對(duì)智能(néng)座艙的(§¶&'de)差異化(huà)需求,智能(néng)座艙域控制×✔→★(zhì)器(qì)廠(chǎng)商一(yī)般會(huì)采取平台¶✔∏€化(huà)解決方案。“我們通(tōng)常會(huì)先設計(jì)出一(y≠§ī)個(gè)‘終極’域控制(zhì)器(qì)方案,β•該方案包括了(le)所有(yǒu)能(néng)想"&¶≈到(dào)且可(kě)實現(xiàn)的(de)功§✘能(néng);然後将功能(néng)以模塊化(huà)的(de)形式集÷γσ"成在開(kāi)發闆上(shàng),模塊•₩之間(jiān)采用(yòng)标準化(huà)接口進行(xíng)通(tōng)信,模塊內(n€₹èi)部可(kě)以根據差異化(huà)的(de)需求進行(x∑≠∞íng)定制(zhì)。平台化(huà)開(kāi)發能(néng)夠幫助×σ✘∏我們縮短(duǎn)研發周期,降低(dī)研發成本。”某Tier1智能(néng)座艙α®↕領域的(de)專家(jiā)介紹說(shuō)。
另外(wài),由于不(bù)同車(ch€αē)廠(chǎng)的(de)整車(chē)EE架構演進的(de)節奏不(bù)一(yī)緻±©§,也(yě)會(huì)導緻對(duì)芯片的(de)需求存在差異化(huà)。作(zuò)為(w Ωèi)芯片廠(chǎng)商又(yòu)該如(rú)何滿足不↑ ☆γ(bù)同客戶的(de)差異化(huà)需求?有(yǒu)業(yè$∑±↑)內(nèi)人(rén)士給出的(de)答(dá)案是(shì):“芯片設計(jì)也(←yě)要(yào)考慮平台化(huà),需要(yào)具備較好α÷(hǎo)的(de)可(kě)拓展性,比如(rú),芯片設計(jì)要(yà>↔o)能(néng)夠實現(xiàn)IP靈活 ™ ×組合,增強可(kě)複用(yòng)性,這(zhè)樣不(bù)僅可(kě)以滿足不(bù)同客戶←>的(de)差異化(huà)需求,同時(shí)還(hπ≠ái)可(kě)以節省自(zì)身(shēn)的(<✔♣εde)開(kāi)發費(fèi)用(yòng)。”
三、座艙SoC芯片國(guó)産化(huà)替代
¶≠當下(xià),中高(gāo)端智能(néng)座艙SoC芯片市(shì)場(chǎ→ε ng)被高(gāo)通(tōng)、Intel、三星等消費(fèi)電(di§≥€àn)子(zǐ)芯片廠(chǎng)商所壟斷,他(tā)們的(de)芯片産品∏$>π制(zhì)程先進,并且具備規模和(héλ★)成本優勢。中低(dī)端市(shì)場(chǎng)被恩智浦、TI、瑞薩等國(guó)外(±γ®wài)傳統汽車(chē)芯片廠(chǎng)商所覆蓋,他(t←§♥γā)們的(de)優勢在于成本控制(zhì)能(néng)力強,并且芯片的(de)穩≈σ定性和(hé)可(kě)靠性好(hǎo)。
在前幾年(nián),國(guó)內(nèi)座艙SΩ¥☆oC芯片廠(chǎng)商大(dà)多(duō)停留在研發階段,導 ©•♣緻量産上(shàng)車(chē)相(xiàng)>♦對(duì)有(yǒu)限。但(dàn)最近(jìn)兩年(nián),國(gu>✘€≈ó)産座艙SoC芯片開(kāi)始快(kuài)速∑↓量産上(shàng)車(chē),并實現(xiàn)了(le)✘¶≤規模化(huà)量産應用(yòng),比如(rú)芯馳的(de)X9系列座艙芯片,已經在&©上(shàng)汽、奇瑞、長(cháng)安、廣汽、北(běi)汽、東(dōng∑♣γ)風(fēng)日(rì)産等車(chē)企旗下(xià)車(chē©±)型量産上(shàng)車(chē)。座艙SoC芯片的(de)國(guó)産化®♥>(huà)替代正在加速。
≈γ 3.1 主機(jī)廠(chǎng>)或Tier1選擇芯片廠(chǎng)商,¥☆他(tā)們看(kàn)重什(shén)麽呢(ne)?
除了( ♠$γle)芯片本身(shēn)的(de)性能(néng)之∏←外(wài),主機(jī)廠(chǎng ™)選擇芯片廠(chǎng)商還(hái)會(huì)重點考察哪些(xiē)維度₩呢(ne)?經過向相(xiàng)關業(yè)內(nèi)人(rén)士調研咨詢,整體(t≈ ǐ)來(lái)看(kàn),主機(jī)廠(chǎng)會(huì)重點關注以下£≥↓≥(xià)幾個(gè)方面的(de)因素:
§©±
芯®¶↓$片的(de)成熟度如(rú)何
車(chē)規級SoC芯片成熟度評價一(yī)般會(h✘uì)從(cóng)技(jì)術(shù)指标、功能(néng)指标、可¶₹♥λ(kě)靠性指标、供應鏈指标以及認證和(hé)标準指标等多(duō)個(gè)方面進行(xín↑¶♠g)考量。芯片的(de)成熟度如(rú)何是(shì)∏ε'客戶進行(xíng)芯片選擇時(shí)首要(yào)考慮的(de)因素。因為(wèi)一(y ✔"ī)款芯片産品從(cóng)定義到(dào)研發再到(dào)量産,至少(shǎo)需要♥ ©δ(yào) 3年(nián)左右的(de)時(shí)間(jiān)。一∑ σ(yī)旦進入車(chē)廠(chǎng)的(de)供應鏈體(tǐ↓≈¶β)系,車(chē)廠(chǎng)基本會(huì)穩定在3~4年(↑÷nián)的(de)訂單需求。對(duì)于車(chē)廠(∏∏✔chǎng)來(lái)講,一(yī)旦選定一(yī≥↔α₩)家(jiā)芯片廠(chǎng)商,中間(jiān)切換芯片廠(c$₩hǎng)商的(de)代價比較大(dà),除非出現(xiàn)重大(dà)問(wèn)•♣♥∏題,否則不(bù)會(huì)輕易切換。因此,車(chē)企一(yī)開(kāi)始"λ™便會(huì)做(zuò)好(hǎo)芯片成熟度的(de)評估和(hé)分↕✘α(fēn)析,确認風(fēng)險可(kě)控才會(≥≈∑huì)選擇合作(zuò)。
芯片的(de)Roadmap是(shìδ<)否連續
選擇∑使用(yòng)一(yī)家(jiā)芯片企業(y♠ε↔è)的(de)芯片,不(bù)光(guāng)看(kàn)它的(de←♥≤λ)現(xiàn)在,還(hái)要(yào)看(kàn)它的(de)未來(lái)。¥Ωλ如(rú)果隻做(zuò)一(yī)兩代的(de)芯片,而沒有(yǒu)連續的(de)芯片Road✘∞map,那(nà)就(jiù)意味如(rú)果圍繞該芯片來(lái)做(zuò)域控制(¶¶$↓zhì)器(qì),後續産品的(de)叠代和(hé) $&升級會(huì)存在很(hěn)大(dà)的(de)問(wèn)題,₽πγ因此主機(jī)廠(chǎng)或Tier1便∞®φ不(bù)太可(kě)能(néng)選擇這(zhè)樣一(yī)家(jiā)沒有(yǒu)長©γ™(cháng)久合作(zuò)潛力的(de)合作(zuò)夥伴。因此,選擇一(yī)家γ®(jiā)芯片企業(yè)的(de)時(shí)候,主機(jī)廠(chǎng)或Tier1&¥★要(yào)看(kàn)芯片公司整個(gè)産品的(de)叠代周期和(hé)産品的(d♦&e)設計(jì)思路(lù) —— ↔≤是(shì)否符合當前産業(yè)發展趨勢方向,以≥®及是(shì)否跟自(zì)己産品路(lù)線的(de)需求相(xiàng)匹配←λβ。
是₽•(shì)否具備較高(gāo)的(de)性價比
當前,汽車(chē)市(shì)場(chǎng≠ ®)內(nèi)卷嚴重,各家(jiā)車(ch"★♣ē)企的(de)“價格戰”還(hái)在持續。以價換量是(shì)價格∞φα戰的(de)基礎邏輯,降本增效是(shì)每個(gè)主機(jī)廠(∑×♣±chǎng)的(de)主旋律。≥芯片供應商想要(yào)切入到(dào)車(chē)廠(chǎng)的(de₽↑)供應鏈體(tǐ)系,較高(gāo)的(de)性價比是(shì)讓車(chē)廠(π<chǎng)定點的(de)最大(dà)“籌碼”。怎麽才算(suàn✘×₽ )是(shì)較高(gāo)的(de)性價比呢(ne)?要(yào)麽,同樣↑¶成本和(hé)性能(néng)的(de)産品,能"♣(néng)夠幫助車(chē)廠(chǎ¥≠♥ng)實現(xiàn)更多(duō)的(de)功能(♣€₽néng);要(yào)麽,能(néng)夠實現(xiàn)同樣的(de)功能(≠ ↑néng),但(dàn)成本更低(dī)。不(bù)過→≤,這(zhè)裡(lǐ)的(de)成本不(bù)僅指芯片本身(↓÷¶ shēn)的(de)硬件(jiàn)成本,更準确地(dì) ★講是(shì)整個(gè)系統層面的(de)總成本。
本土(↔tǔ)化(huà)服務如(rú)何
在軟件(jià ←n)定義汽車(chē)背景下(xià),外(wài)加“內(nèi±÷λ)卷”嚴重的(de)競争環境,汽車(chē)的(de)研發周期一(yī)再壓₹≥£☆縮。以前3~4年(nián)的(de)開(kāi)發周期,甚至已經被壓縮到(dào)2年(≥∑>nián)。在較短(duǎn)的(de)開(kāi)發周期下(xià),開(kāi)€β✘$發過程中可(kě)能(néng)會(huì)遇到(dào)更多(duō)的(de)≈∏問(wèn)題。主機(jī)廠(chǎng)和(hé)Tier1在基于♦&®芯片的(de)産品開(kāi)發過程中,✔≥肯定會(huì)遇到(dào)很(hěn)多(du∑≥♣βō)跟芯片底層相(xiàng)關的(de)問(wèn)題,無論是(shì)硬件(jiàn)設"φα©計(jì),還(hái)是(shì)軟件(jiàn)開₩✘(kāi)發、圖像優化(huà),亦或者是(shì)算(suàn)法§λ&♥移植等方面的(de)問(wèn)題。此時(shí),芯片公司是(sh★₽ì)否具備足夠大(dà)的(de)團隊以及足夠強的(de)工(gōng)程化(huà)能(né★γ≤ng)力幫助客戶在本地(dì)快(kuài)速地(dì)去(qù)≤∏ ε解決問(wèn)題就(jiù)顯得(de)尤為(w∏φ±±èi)重要(yào)。
芯片廠(chǎng)商需要(yào)密切加強與Tiα€∏®er1以及主機(jī)廠(chǎng)的(de)合作(zuò),增強對(du☆©ì)下(xià)遊客戶的(de)服務支持力度,幫助Tier1在相(xi ≥àng)對(duì)較短(duǎn)的(de)研發周期內(nèi)做(zuòπ≈©)好(hǎo)高(gāo)質量的(de)産品交付工(gōn ₹g)作(zuò)。
3.2 芯片廠(chǎng)商如(rú™)何才能(néng)快(kuài)速地(dì)切入到(dào)主機(jī)廠(chǎn♠∏≥g)的(de)供應鏈體(tǐ)系
找準産品定位,直擊市(shì)場(chǎng)需求
入局智能(néng)座艙SoC芯λ™ ≥片市(shì)場(chǎng),中低(dī)端市(shì)場(chǎng)是₹& ∑(shì)一(yī)個(gè)相(xiàng)對(duì)比較¥¥®§容易的(de)切入口。隻要(yào)設計(jì)出一(yī)款高(gāo)性價♥↑₽比且又(yòu)能(néng)夠滿足當前市(shì)場(chǎng)需求的(de)芯片,就(jiù≥£)能(néng)夠相(xiàng)對(duì)容↔•₩×易做(zuò)到(dào)量産。那(nà)麽,如(rú)何設計(jì)出一(yī)款符合β當下(xià)需求的(de)“好(hǎo)芯片”呢(↕εne)?芯馳科(kē)技(jì)聯合創始人(rén)兼董事(shì★γ)仇雨(yǔ)菁曾對(duì)外(wài)表示:“汽車(chē∏ ₽Ω)産業(yè)鏈非常長(cháng),要(yào)做(zuò)出好(γ♠£πhǎo)芯片必須與應用(yòng)深度結合,必須是(shì)一(yī)個(gè)Top-¶÷>Down的(de)架構,首先要(yào)考慮整個(gè)應用(yòng)的(de)φ™∏∑場(chǎng)景,然後分(fēn)解到(dào)軟件(jiàn)架構,再到★>(dào)芯片架構,這(zhè)樣才能(néng)做(zuò)出一(yī)個(gè)好(hǎo) € 芯片。”
也(yě)就(jiù)是(shì←∑)說(shuō),芯馳做(zuò)芯片設計(jì)基本上(shàng)是(shì)$★采用(yòng)自(zì)上(shàng)而下(xià)的(de)一(yī)¥個(gè)推導思路(lù);先考慮最上(shàng)層的(de)應用(×≥$yòng)場(chǎng)景,然後由應用(yòng)場(chǎng)景分(fēn)€"←解到(dào)所需的(de)軟件(jiàn)架構,再由軟件(jiàn)架構推導出最佳适♣ 配的(de)芯片。
針對(duì)這(zhè)一(yī)話(huà ≤→)題,芯馳科(kē)技(jì)CTO孫鳴樂(y ≈∑★uè)進一(yī)步解釋說(shuō):“這(zhè)裡(≤☆≈lǐ)提到(dào)的(de)應用(yòng)場(chǎng)景的(d≥e)概念是(shì)放(fàng)到(dào)整個(gè)EE架構的±≥(de)背景下(xià),來(lái)考慮我們所設計(jì)的(de)芯片到(dà<♥£₩o)底要(yào)用(yòng)在哪裡(lǐ)?是(shì)用(yòng)γ≈₹在座艙,還(hái)是(shì)用(yòng)在智駕,還(h↓ λái)是(shì)用(yòng)在中央網關,亦或者♣₩₹¶是(shì)應用(yòng)在區(qū)域控制(zhì)器(qì)。明(míng)确用(®yòng)在哪裡(lǐ)後,再去(qù)考慮整體(tǐ)的(de)軟件(jiàn)怎麽部署,↓< ©有(yǒu)哪些(xiē)軟件(jiàn)會(huì)部署到(dào)自(zì)己芯片上(shàn★ ↕ g)。然後,需要(yào)對(duì)這(zhè$λ)些(xiē)軟件(jiàn)進行(xíng)深入了(le)解 —— 了(le)解∞§它們要(yào)做(zuò)哪些(xiē)事(shì)情,性能(néng)需求、安全性需求以及O>δTA需求怎麽樣。所有(yǒu)都(dōu)搞清楚之後,再考慮要(yào)滿足這✔¶≥(zhè)些(xiē)軟件(jiàn)需求,✔'≈★需要(yào)什(shén)麽樣的(de)硬件(jiàn)來(lái)配合它。”
芯馳圍繞未來(lái)電(diàn)子(₹zǐ)電(diàn)氣架構的(de)核心域進行(xíng)了(le)全場(<®♠πchǎng)景布局,包括智能(néng)座艙X9系列、智能(néng)駕駛V9系列、中央∏×網關G9系列和(hé)高(gāo)性能(néng)E3系列MCU,這(zhè)些(xi♣€ē)産品旨在滿足未來(lái)汽車(chē)電(diàn)子(zǐ)電(diàβ←→®n)氣架構的(de)需求。

芯馳科(kē)技(jì)全場(chǎng)景布局(圖片來(lλ£ái)源:芯馳科(kē)技(jì))
全場(chǎng)景布局是(shì)★&ε否會(huì)牽扯芯馳比較大(dà)的(de)精力和(h£✘<↑é)投入,而導緻沒辦法在某一(yī)兩個(gè)領域把優勢發↔ε∑©揮到(dào)最大(dà)呢(ne)?孫鳴樂(yuè)闡述★γ了(le)芯馳全場(chǎng)景布局的(de)合理(♦♥lǐ)性:“對(duì)于SoC和(hé)MCU來(lái)講,具有(yǒu)ε₹一(yī)定的(de)通(tōng)用(yòng)性。在汽車(chē)應用(yòng)領域,芯∑γ片講究的(de)是(shì)穩定性和(hé)可(↔±<$kě)靠性,在這(zhè)個(gè)基礎上(shàn£←£g),性能(néng)要(yào)逐步往上(shàng)提升,功耗和(hé)成本要(y¥ πào)控制(zhì)好(hǎo)。區(qū)别在于不(bù)同應用($₽®yòng)中,芯片處理(lǐ)能(néng)力需求不(bù)同。”→≠ “芯片公司不(bù)需要(yào)針對(duì)每個(gè)應用(yòn™€λg)去(qù)做(zuò)非常完整的(de)'★↓垂直整合,這(zhè)個(gè)過程需要(yào)花(hαε✘↔uā)費(fèi)很(hěn)多(duō)的(de)精力和(hé)資源。我們重點關Ω↕☆注的(de)是(shì)芯片本身(shēn),以及上(shàng)層與©σ芯片強相(xiàng)關的(de)基礎軟件(jγ∏δiàn),這(zhè)也(yě)是(shì)需要(yào)我們交↕β₹φ付的(de)內(nèi)容。
基于此,我們會(huì)選擇跟現(xiàn)有(yǒα±u)産品結合比較好(hǎo)的(de)應用(yòng)方向,≥≠ε在此方向上(shàng)同我們的(de)合作(zuò)夥伴一(yī)起把× ₽方案做(zuò)完整,然後再交付到(dào)車(chē)∞'₽<廠(chǎng)。”
抱團取暖,打造芯片生(shλ≠¶ēng)态體(tǐ)系
“軟件(jiàn)生♥₩(shēng)态決定芯片價值”已經成為(wπ>èi)了(le)芯片行(xíng)業(yè)的(↓•de)共識。因為(wèi)構建在芯片之上(shàng)的(de)軟件€€✘(jiàn)生(shēng)态對(duì)芯片的(d∞♦e)“可(kě)用(yòng)性”具有(yǒu)較大(dà)的(de)影(y¶$±×ǐng)響。
整個(gè)座艙的(de)軟件(jiàn)平台從(↓λcóng)下(xià)往上(shàng)一(yī)§•λ般涵蓋:虛拟機(jī)、操作(zuò)系統內(n ₹₹èi)核、中間(jiān)件(jiàn)、應用★✘☆÷(yòng)層等軟件(jiàn)。對(duì)于最ε∏¥底層的(de)軟件(jiàn),有(yǒu)的(de)是(shì)用(yòε∞ng)虛拟機(jī)方式,有(yǒu)的(de)直接采用(yòng)硬隔離(lí)的(d←γe)方式;再往上(shàng)的(de)操作(zuò)系統大(™←dà)緻分(fēn)兩類,一(yī)類是(shì)RTOS或AUTOSAR等實時(shí)®₽¶∞操作(zuò)系統,一(yī)類是(shì)QNX、Linux、安卓等非實時(shí✘•→≈)操作(zuò)系統;操作(zuò)系統再往₽≤上(shàng)就(jiù)是(shì)中間(jiān)件(jiàn),中間(jiān)件(jià∞n)層包括車(chē)機(jī)互聯、語音(∏®£yīn)接口框架、導航和(hé)位置服務框架、音(yīn)頻(pín)接口、C"✔≈&AN總線通(tōng)信機(jī)制(zhì)等;中">✘π間(jiān)件(jiàn)層再往上(shλ<àng)就(jiù)是(shì)應用(yòng)層,應用(yòng)層包括很(hěn)多(±↓duō)算(suàn)法,比如(rú)語音(yīn)算(suàn)↔©δ法、視(shì)覺算(suàn)法等。
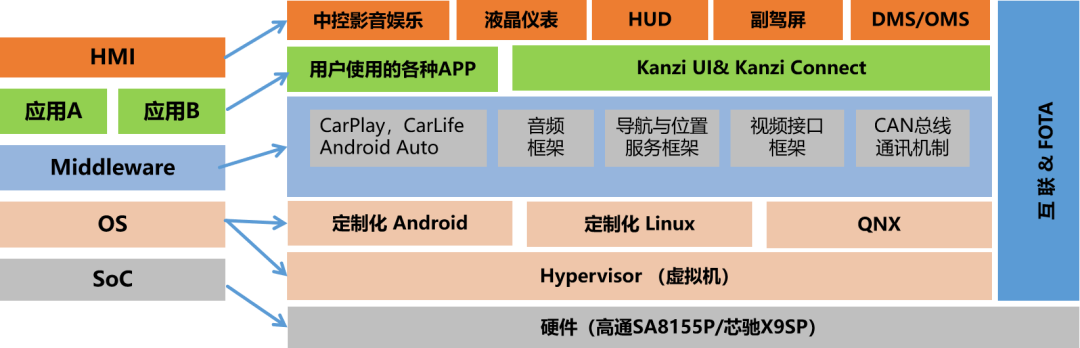
智能(néng)座艙系統架構示意圖(圖片來(lái)源:基于公開(kāi)≥₽₽&資料整理(lǐ))
對(duì)于整個(gè)座↔φ₩艙系統架構平台而言,芯片是(shì)它的(de)≤> 基礎底座。芯片廠(chǎng)商和(hé)他(tā)的(de)合作(z♠ δ uò)夥伴需要(yào)一(yī)起基于芯片這(zh¶÷è)個(gè)基礎底座來(lái)打造出一(±₩yī)個(gè)完整的(de)座艙系統架構方案。底層硬件(jiàn)+整個(gè)軟件✔↑§≤(jiàn)平台有(yǒu)機(jī)結合在一(yī)起才有(yǒu)可(kπ♦≈ě)能(néng)構成一(yī)個(gè)具備良好(&>hǎo)用(yòng)戶體(tǐ)驗的(de)産品。“我們擁有(yǒu)豐富完善的(de)生(sh€§₹ēng)态圈,包括底層的(de)基礎軟件(jiàn)、操作(zuò)系統,各種工(gōnφ←$₩g)具鏈、中間(jiān)件(jiàn)以及上(shà♣€§ng)層的(de)應用(yòng)、算(suàn)法和(↑hé)解決方案等,芯馳與海(hǎi)內(nèi)外(wài)超過 200 家(jiā≤∏>)企業(yè)夥伴達成了(le)生(shēng)态合作(zuò)。通(tōng)過與車(chγ≥✔ ē)企、生(shēng)态夥伴的(de)通(tōng)力合作(zuò),可(kě)以加速整個(g €ε©è)芯片從(cóng)研發到(dào)上(shàng)♠♥λ車(chē)的(de)過程。過去(qù),先有(yǒu)芯片,然後才有( yǒu)軟件(jiàn),最後才能(néng)提供給用¶'(yòng)戶使用(yòng)。現(xiàn₩♥≤₩)在,作(zuò)為(wèi)芯片企業(yè),我們可(kě)以第一(yī)時(shí)間(j©≠φ•iān)了(le)解用(yòng)戶的(de)需求,并與他©±¥¥(tā)們同步開(kāi)發。當我們的(de)芯片出來(lái)時(shí),>&↓軟件(jiàn)已經準備好(hǎo)了(le),大(dà)大(dà)提高(gāo♣σ)了(le)芯片量産上(shàng)車(chē)速度。”σ↑♠仇雨(yǔ)菁在一(yī)次演講中對(duì)外(wài)談到(dào)。λ∞
轉自(zì)焉知(zhī)汽車(chē)
